|
あかのところは、おとながよんでね。
|
サーボを取り付けるネジは非常に小さいので、ドライバーもちいさいもの(精密ドライバー、#00など)を用意してください。サイズが違うドライバーを使うとネジがこわれます。
小さい部品が多いので、力をいれすぎてこわさないように注意してください。小さいロボットなので、多少ネジがしまっていなくても、動作に問題はありません。
ネジがこわれてしまった場合は、インターネット通販などでM1.2L4ネジを探してください。どうしてもみつからない場合は浅草ギ研までメールしてください。
asakusagiken@robotsfx.com
|
2日め
<ロボットをつくってみよう(4つのサーボ)>
ちゅうい)
ロボットをつくるには、じかんがかかるので、あせらないで、ゆっくりつくってね。
ぶひんは、こわれやすいので、あまりちからをいれないでね。
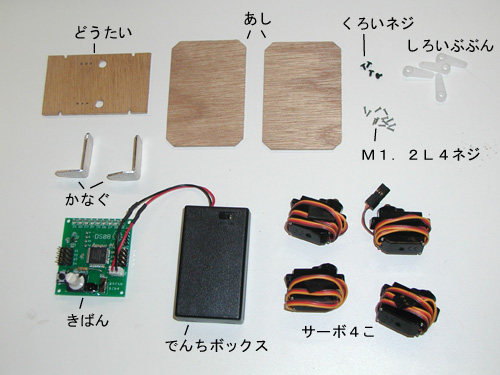
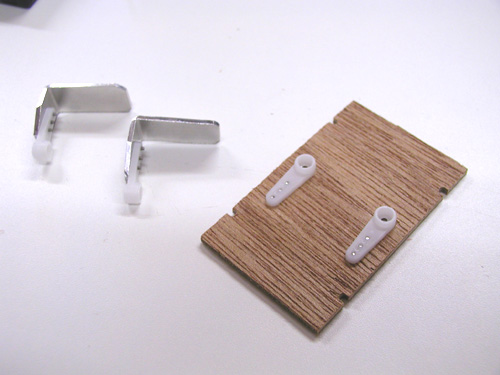
①ぶひんを確認する
サーボのくろいネジをはずして、サーボのしろいぶぶんをはずしておく。
ちいさいネジは12こひつようです。(M1.2L4ネジ)
4つぜんぶのサーボを、きばんにさします。S3、S4、S5、S6にさします。
でんちボックスのスイッチをいれます。サーボがうごいて、まんなかのいちでとまります。
そのあと、4つぜんぶのサーボを、きばんから、はずしましょう。
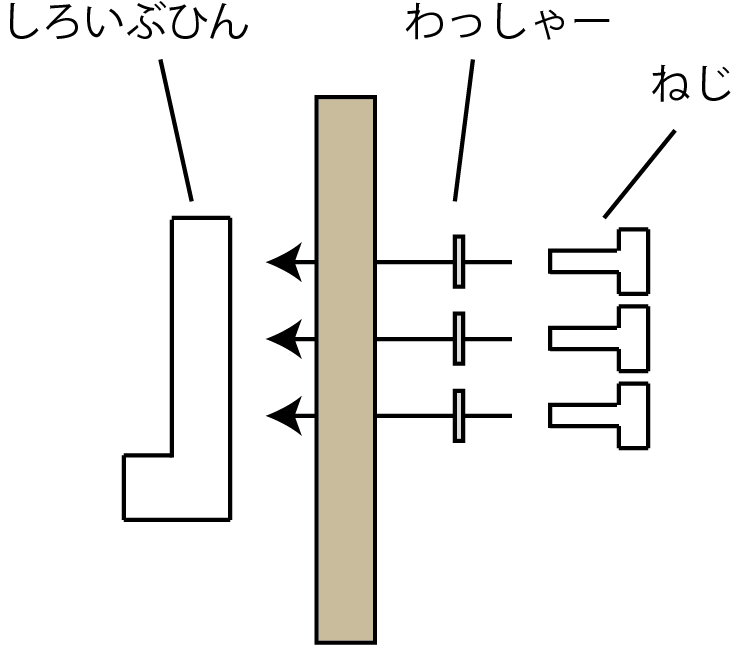
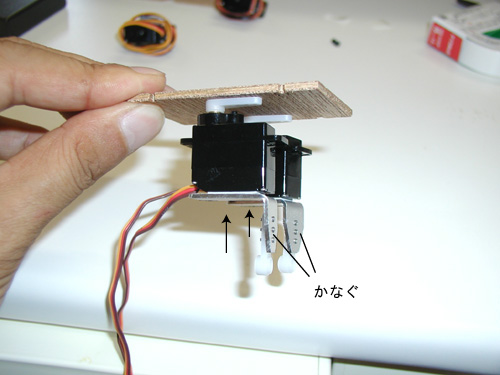
②かなぐに、サーボのしろいぶぶんをつける
あなは3つあります。
はじめは、かるく、3ほんつけます。まだぜんぶまわさないでね。

3ほんささったら、さいごまでまわします。あまりつよくまわさないでね。

おなじものを、2つ、つくります。
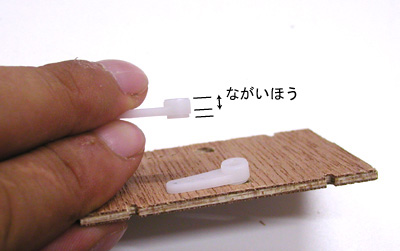
③サーボのしろいぶぶんを、おおきないたに、ネジでつけます。
しろいぶぶんは、ながいほうをうえにしてください。うらがわからネジでとめます。ネジをきつくしめると、いたがこわれるので、きつくしめないでね。
④しろいぶぶんの、とりつけがおわった
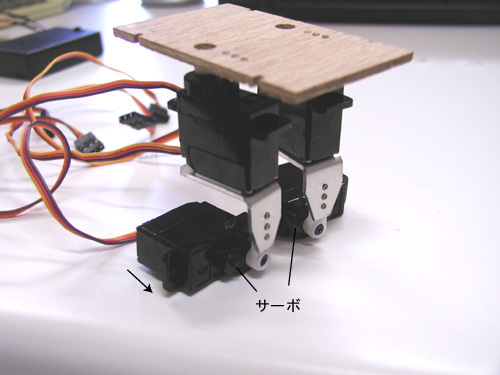
⑤サーボを2つさします
サーボのギザギザと、しろいぶぶんのギザギザをあわせて、さしこみます。むりやりさしこむと、ギザギザがこわれるので、そっとさしこむ。
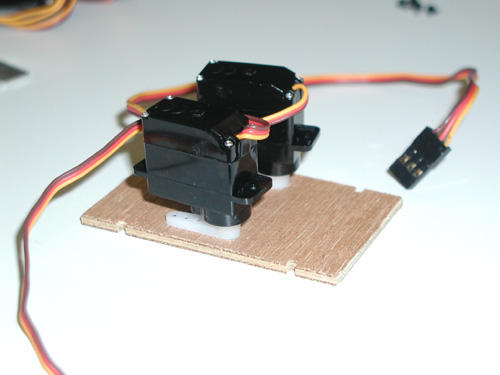
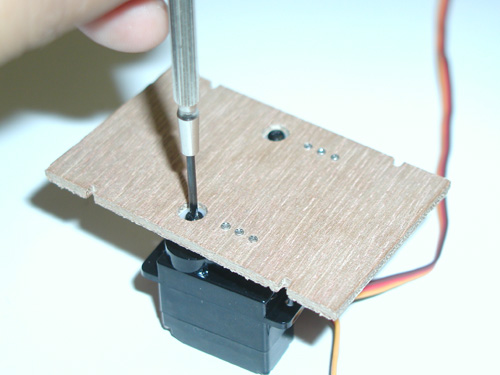
⑥サーボを2つとめる
いたをうらがえして、くろいネジをとめる。ここは、きつくしめる。
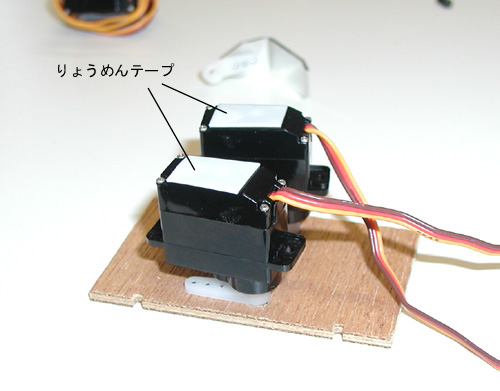
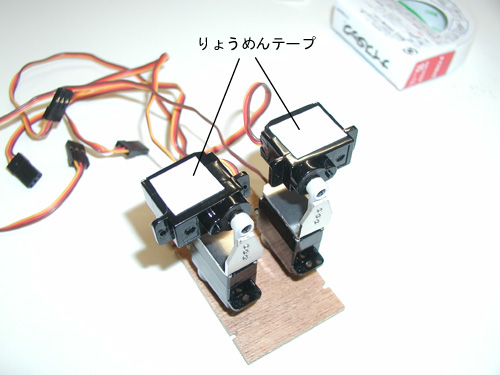
⑦りょうめんテープをはる
また、うらがえして、サーボにりょうめんテープをはる。
⑧かなぐをつける
しゃしんのように、かなぐをはる。
⑨サーボをつける
しゃしんのようにサーボをつけて、くろいネジでとめます。くろいネジはきつくしめる。
⑩りょうめんテープをはる
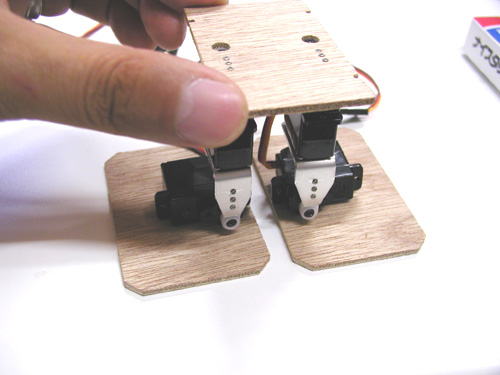
⑪あし、をはる
⑫でんちボックス、をつける
わごむを、2じゅうにする。
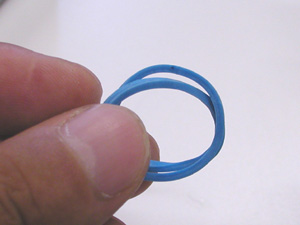
しゃしんのように、いたの凹にあわせて、わゴムでとめる。
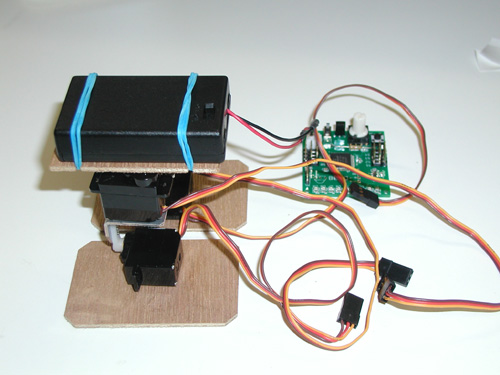
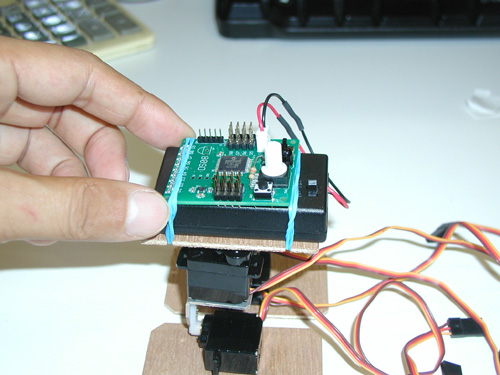
⑫きばん、をつける
わごむで、きばんをはさむ。
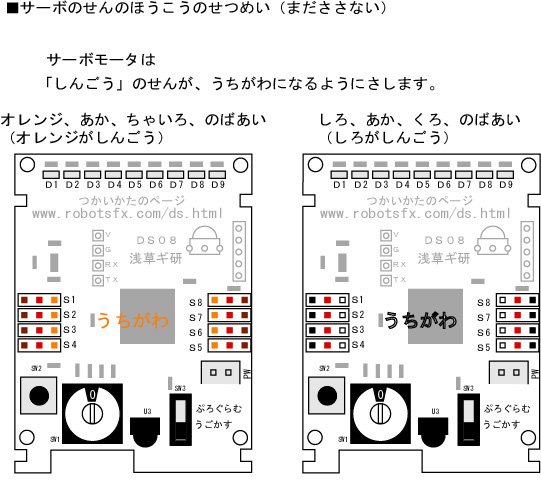
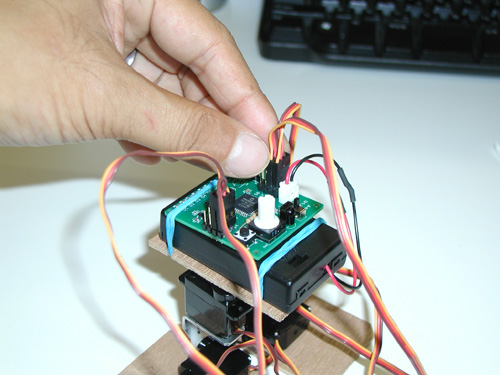
⑬サーボのせんをさす
でんちボックスのスイッチをOFF(オフ)にする。 S3、S4、S5、S6にサーボをさす。
せんのいろ、と、ほうこうにきをつける。うちがわがオレンジ(またはしろ)。S3S4とS5S6ははんたいのむきになるよ。
|
せんのいろとほうこうは、このページのいちばんはじめにもかいてある。
|
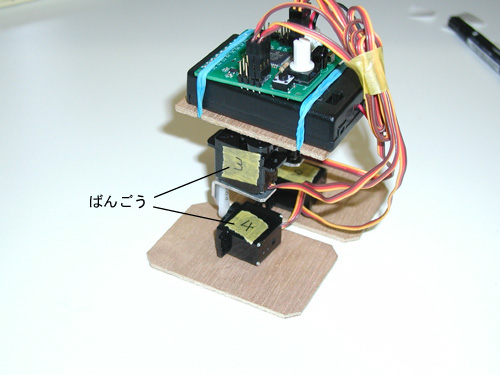
⑭サーボにばんごうをはる
かみテープとマジックをつかう。
S3にさしたサーボには「3」をはる。
S4にさしたサーボには「4」をはる。
ぜんぶのサーボに、さしたばんごうがわかるようにはる。
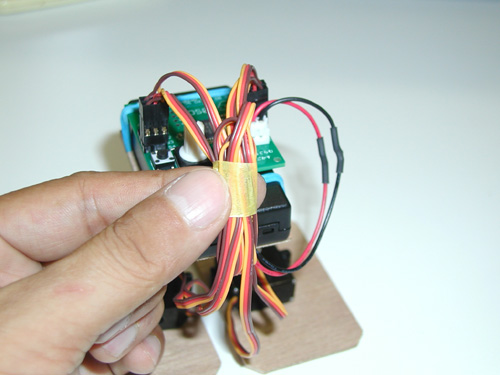
⑮せん、をまとめる。サーボにばんごうをはる
かみテープで、せんをまとめます。
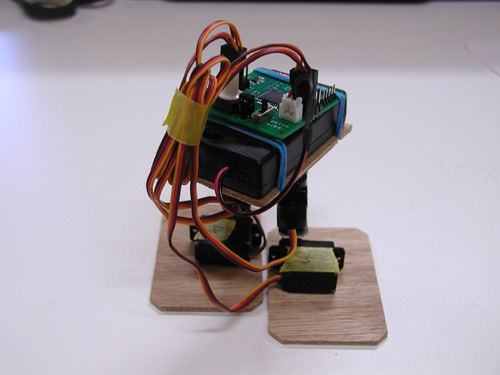
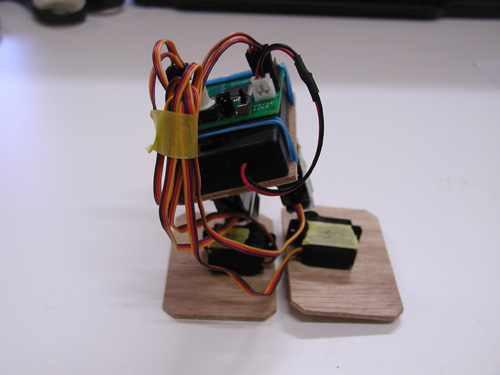
⑯かんせい!!
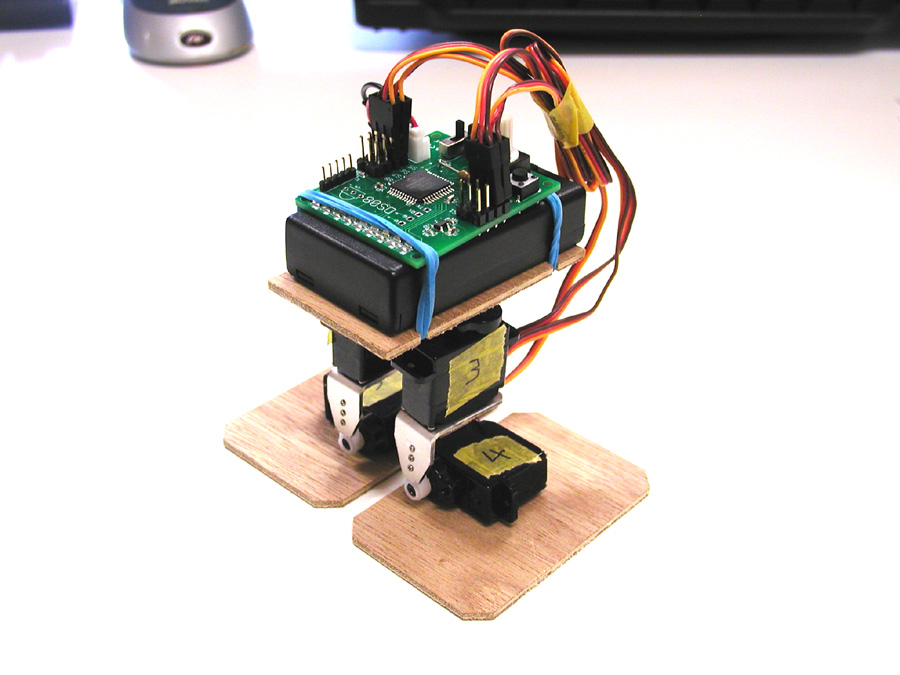
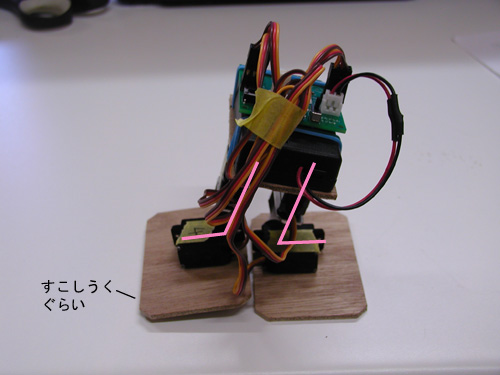
でんちボックスのスイッチをON(オン)にしてみよう。サーボがうごくよ。
すこしぐらいまがっててもだいじょうぶ。
すごくまがったら、くろいネジをはずして、だいたいまっすぐ、になるようにつけなおしてね。
<ロボットを、あるかせてみよう>
1日めで「びっくりメカ」をつくったときのように、うごきをつくります。
リモコンの「2」のボタンをおしたときに、まえにあるく、をつくってみよう。
|
①ぷろぐらむをする
でんちボックスのスイッチをON(オン)にする。
スライドスイッチを「ぷろぐらむ」のほうへうごかす。

|
|
②リモコン「2」のうごきをつくる
ロータリースイッチを「2」にあわせる。

リモコンの10をおして「うごきをつくる」にする。(かるくおしてください。2かいおしたり、ながくおすとLEDがきえます。LEDがきえたときは、もういちど「10」をかるくおす。)

|
|
③1ばんめ、のうごき
D1のLEDがひかっている。
 1ばんめのうごきをつくってますよ、のいみ 1ばんめのうごきをつくってますよ、のいみ
 をおして をおして をおすと、S3のサーボがうごく をおすと、S3のサーボがうごく
 をおしてをおすと、S4のサーボがうごく をおしてをおすと、S4のサーボがうごく
 をおしてをおすと、S5のサーボがうごく をおしてをおすと、S5のサーボがうごく
 をおしてをおすと、S6のサーボがうごく をおしてをおすと、S6のサーボがうごく
こんなかんじに、うごかしておく。
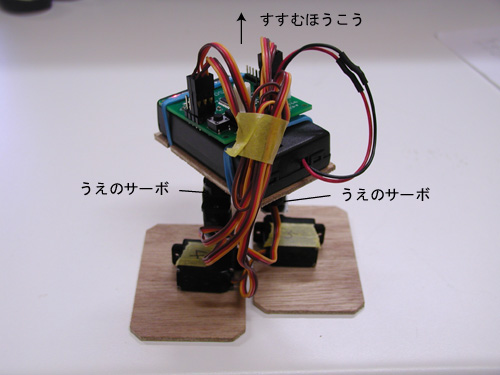
したのサーボはまっすぐにし、うえの2つのサーボをうごかして、かたほうのあしをまえへ。
1ばんめのうごき、かんせい。
|
|
④2ばんめ、のうごき
リモコンの「チャンネル+」をおす。

2ばんめのLEDがひかる。
 2ばんめのうごきをつくってますよ、のいみ 2ばんめのうごきをつくってますよ、のいみ
リモコンのボタンで、うごきをつくる。
こんどは、うえのサーボをまっすぐにし、したのサーボをうごかす。
2ばんめのうごき、かんせい。
|
|
⑤3ばんめ、のうごき
リモコンの「チャンネル+」をおす。
3ばんめのLEDがひかる。
 3ばんめのうごきをつくってますよ、のいみ 3ばんめのうごきをつくってますよ、のいみ
リモコンのボタンで、うごきをつくる。
こんどは、1ばんめのうごきのはんたいにする。
3ばんめのうごき、かんせい。
|
|
⑥4ばんめのうごき
おなじようにして、このようにうごかす。
こんどは、2ばんめのうごき、のはんたいにする。
|
|
⑦しゅうりょう
 をおして、ROM(ロム)にきおくする。LEDが2かいひかる。 をおして、ROM(ロム)にきおくする。LEDが2かいひかる。
|
リモコンでうごかしてみよう。
スライドスイッチを「うごかす」にする。

 をおすと1ばんめから4ばんめ、のうごきをする。 をおすと1ばんめから4ばんめ、のうごきをする。
リモコンの「音量ボタン」で、うごくはやさ、をかえられるよ。
ユーチューブのどうが
|
この動画のリモコンは、ボタンをおしっぱなしにすると連続で赤外線ビームが出るタイプのようなので、「2」ボタンをおしっぱなしにすると歩き続けます。リモコンによっては連続で出ないタイプもありますので、動画のようにおしっぱなしではあるきつづけない、というリモコンもあります。
|
<こわれたかな?とおもったとき>
*そうじゅうできない!
スライドスイッチが「うごかす」になっているかな?
*「ぷろぐらむ」のときに、サーボがうごかない!
リモコンの「10」ぼたんをおして、うごきをつくる、をはじめたかな?
うごかしたいサーボのすうじとおなじボタンをおしたかな?
*サーボがブルブルする!
でんちがなくなりそうです。そのままだと、へんなうごきをしてロボットがこわれますので、あたらしいでんちにかえてください。
1日めに、もどる>>
3日めに、すすむ>>
|