偼偠傔偵
丂偙偙偱偼愺憪僊尋惢係幉曕峴儘儃僢僩AT-WALKER偵挻壒攇嫍棧僙儞僒傪晅偗偰傒傑偡丅偙偙偱巊梡偡傞AT-WALKE偵偮偄偰偼AT-WALKER偺徯夘儁乕僕傪嶲徠婅偄傑偡丅彯丄俙俿亅倂俙俴俲俤俼偺惢嶌丒僾儘僌儔儈儞僌偺婎杮偵偮偄偰偼彂愋傪嶲徠婅偄傑偡丅僙儞僒乕晹暘偺僾儘僌儔儉偵偮偄偰偼偙偺儁乕僕偱徯夘偟傑偡丅
挻壒攇嫍棧僙儞僒乕PING)))
丂挻壒攇嫍棧僙儞僒乕偼丄恖娫偱偼暦偙偊側偄偖傜偄崅偄廃攇悢偺壒攇傪挻壒攇敪惗慺巕偱敪幩偟丄暔懱偵壒攇偑摉偨偭偰挼偹曉偭偰偔傞帪娫傪寁應偡傞偙偲偱嫍棧傪應掕偡傞丄偲偄偆偺偑婎杮揑側僔僗僥儉偱偡丅
丂丂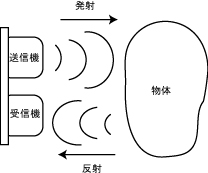
丂挻壒攇偲尵偭偰傕丄婎杮揑偵偼壒攇側偺偱丄敪幩偡傞壒攇偑戝偒偗傟偽墦偔傑偱壒攇偑撏偔丄偮傑傝墦偔偺嫍棧傑偱應掕偱偒傞偲偄偆偙偲偵側傝傑偡丅媡偵丄彫偝偄壒攇偟偐嶌傟側偄応崌偼挼偹曉偭偰偒偨壒攇偑庛偔偰應掕偱偒側偄偲偄偆偙偲偵側傝傑偡丅懳徾暔傕壒攇傪挼偹曉偡傕偺偱側偄偲應掕偱偒傑偣傫丅
丂儊儕僢僩偲偟偰偼丄岝妛宯偺嫍棧僙儞僒偲斾傋傞偲丄柧傞偝側偳偺廃傝偺娐嫬偵嵍塃偝傟側偄偱應掕偱偒傞偲偄偆偙偲偑偁傝傑偡丅
丂挻壒攇憲怣慺巕傗庴怣慺巕偼揹巕晹昳揦偱傕擖庤偡傞偙偲偑偱偒傑偡偑丄廃攇悢敪惗夞楬傗揹椡憹暆夞楬傪嶌傞昁梫偑偁傝丄價僊僫乕偑慺巕偐傜嶌傞偵偼彮乆擄偟偄偐偲巚偄傑偡丅偪側傒偵丄廐梩偱偡偲愮愇揹彜偺2F偵悢庬椶偺挻壒攇慺巕偑斕攧偝傟偰偄傑偡乮杊揌巇條偲偐乯丅
丂愺憪僊尋偱偼丄挻壒攇慺巕偵廃攇悢敪惗夞楬傗揹椡憹暆夞楬傪晅偗偰應掕嫍棧傪僷儖僗暆偱曉偡儌僕儏乕儖丄PING)))傪斕攧偟偰偄傑偡丅偙傟偼俆V巇條側偺偱捠忢偺儅僀僐儞偺俧俹俬俷乮斈梡僨僕僞儖俬俷乯偵捈寢偟偰憖嶌丒應掕偡傞偙偲偑偱偒傑偡丅俹俬俶俧乯乯乯偺彜昳愢柧偼偙偪傜偵傕偁傝傑偡偑丄埲壓偵奣梫傪帵偟傑偡丅
亙僺儞攝楍亜
丂丂
亙摦嶌亜
丂丂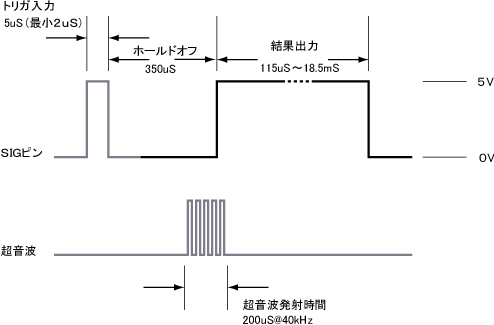
丂俹俬俶俧偵偼怣崋慄偑丂俽俬俧丂偟偐偁傝傑偣傫偑丄偙傟偼應掕奐巒傪巜帵偡傞僷儖僗擖椡偲丄寢壥僷儖僗偺弌椡傪寭梡偟偰偄傑偡丅戝掞偺儅僀僐儞偼丄俬俷僺儞偺擖弌椡曽岦傪愗懼傜傟傞偺偱埲壓偺庤弴偱應掕傪偡傞偙偲偑偱偒傞偐偲巚偄傑偡丅俙俿亅倂俙俴俲俤俼偵巊傢傟偰偄傞ATmega32儅僀僐儞傕摨偠偔丄僺儞偺擖弌椡傪愗傝懼偊傜傟傑偡丅
丂侾乯俬俷僺儞傪弌椡偵愝掕
丂俀乯俬俷僺儞偐傜俆倳俽偺俫倝倗倛僷儖僗傪憲怣
丂俁乯俬俷僺儞傪擖椡偵愝掕
丂係乯俴倧倵偐傜俫倝倗倛偵側偭偨弖娫偐傜俴倧倵偵栠傞傑偱偺帪娫傪儅僀僐儞偺僞僀儅偱寁應
幚嵺偺愙懕
丂幚嵺偵挻壒攇僙儞僒乕傪庢傝晅偗偰傒傑偡丅側偍丄偙偙偱徯夘偡傞偺偼偁偔傑偱傕堦椺偱偡丅僙儞僒乕偺屌掕曽朄傕偄傠偄傠偁傞偲巚偄傑偡丅
丂挻壒攇僙儞僒偵偼斈梡俬俷僺儞傪侾偮偮側偓傑偡丅傑偨丄僙儞僒偵偼揹尮偑昁梡偱偡丅俙俿亅倂俙俴俲俤俼偺俬俷弌椡偼俀丏俆係倣倣僺僢僠偺僗儖乕儂乕儖偵側偭偰偄偰丄椬偵偼俆倁弌椡偲俧俶俢偑攝抲偝傟偰偄傑偡偺偱僙儞僒乕偺揹尮偼偙偙偐傜庢傞偙偲偑偱偒傑偡丅彯丄俙俿亅倂俙俴俲俤俼儅僀僐儞儃乕僪偐傜嫙媼偱偒傞揹棳偼嵟戝侾俙側偺偱丄僙儞僒乕椶傪懡悢偮偗傞応崌偼偦傟偧傟偺僙儞僒乕偺徚旓揹棳偺崌寁偵婥傪偮偗偰偔偩偝偄丅崱夞偺傛偆偵挻壒攇僙儞僒乕傪侾偮偩偗側傜悢廫倣俙側偺偱栤戣偁傝傑偣傫丅
丂僗儖乕儂乕儖偵捈愙攝慄偟偰傕椙偄偺偱偡偑丄屻偱偦偺俬俷僺儞偺摿庩婡擻偑巊偄偨偔側偭偨応崌偵丄懠偺僺儞偵晅偗懼偊偱偒傞傛偆偵丄崱夞偼僿僢僟僺儞傪庢傝晅偗偰丄僙儞僒乕偲偼働乕僽儖愙懕偡傞偙偲偵偟傑偟偨丅
丂偳偺僺儞傪巊偆偐偱偡偑丄幚偼僐僐偱寢峔僴儅傝傑偟偨丅
丂 偲偄偆偺傕丄埲慜丄柍慄婡偲僔儕傾儖捠怣傪偡傞偺偵TX僺儞乮PD0偲嫟桳乯傪巊梡偟偰丄偙偙偵僺儞僿僢僟傪僴儞僟晅偗偟偰偄偨偺偱僐儗傪巊偍偆偲巚偭偨偺偱偡偑NG丅偁偲偱僾儘僌儔儉傪徯夘偟傑偡偑丄偲傝偁偊偢嫍棧傪PC傊憲偭偰GDL偵偮偄偰偄傞SIMPLETERM偱儌僯僞乮偙偺曈傝偼彂愋偵徻偟偔彂偄偰偁傝傑偡丅乯偟傛偆偲巚偄丄僙儞僒傪愙懕偟傑偟偨偑摦偒傑偣傫丅傛偔峫偊傞偲摉慠側偺偱偡偑丄PC傊寢壥傪憲傞偵偼TX僺儞偐傜憲傝傑偡偑偙傟偼PD0偲嫟桳側偺偱偟偨丅俆V偺僔儕傾儖捠怣偼捠怣懸偪忬懺偱忢偵俆V偑弌椡偝傟傞偺偱捠怣偟偰偄側偄偲偒偱傕PD0偼俆V偵忋偑傝偭傁側偟偱偡丅
丂師偵僺儞僿僢僟傪庢傝晅偗傞偺偑娙扨偩偭偨偺偱壗傕峫偊偢偵PB7偵僺儞僿僢僟傪晅偗偰僙儞僒乕傪愙懕偟傛偆偲偟傑偟偨偑僐儗傕NG丅偍偦傜偔ATmega32偺僨乕僞僔乕僩傛偔撉傔偽尨場偑傢偐傞偐傕抦傟傑偣傫偑丄椡恠偒偨偺偱撉傫偱傑偣傫丅乮杮偱偼乽僨乕僞僔乕僩傪傛偔撉傕偆乿偲偐尵偭偰偍偒側偑傜丏丏丏乯
丂偲偄偆偙偲偱偙偙偱偼PB6傪巊偄傑偡丅乮屻偱傗傝傑偡偑丄PB6偱摦偒傑偟偨丅乯
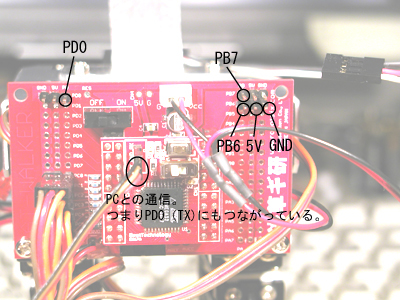
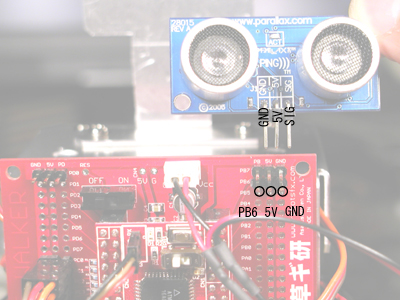
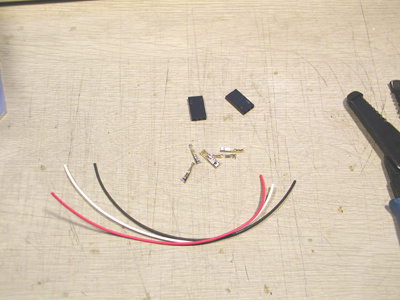
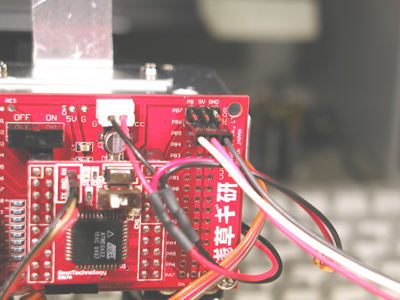
丂攝慄偼僙儞僒偺SIG傪儅僀僐儞儃乕僪偺PB6偵偮側偓傑偡丅偦偺懠偼俆V摨巑丄GND摨巑傪偮側偓傑偡丅傛偭偰丄偙偺娫傪偮側偖働乕僽儖傪嶌傝傑偡丅偳偪傜傕僿僢僟僺儞側偺偱侾倶俁楍偺俀俆俆侽僐僱僋僞乮愺憪僊尋偱斕攧偟偰傑偡丅2.54倣倣僺僢僠偺僐僱僋僞丅乯偱偮側偖偙偲偵偟傑偟偨丅
丂壓偼僐僱僋僞偺晹昳偱偡丅俆V偼愒丄GND偼崟丄怣崋慄偼敀偵偟傑偟偨丅
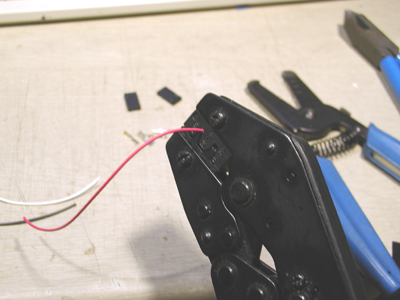
丂壛岺偼埑拝岺嬶偱抂巕傪慄偵偮偗偨屻偵丄抂巕傪僐僱僋僞乮崟偄傕偺乯偵嵎崬傑偡丅
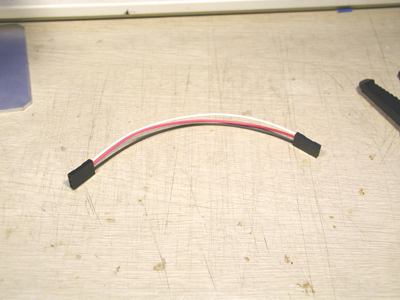
丂弌棃忋偑偭偨働乕僽儖偼壓偺傛偆偵側傝傑偟偨丅僒乕儃偺墑挿働乕僽儖傒偨偄偱偡偹丅幚嵺丄慄偺攝楍偑僒乕儃偲摨偠側偺偱丄儔僕僐儞梡偺僒乕儃墑挿働乕僽儖偱傕巊偊傞偲巚偄傑偡丅RC僒乕儃傕僺儞娫偼俀丏俆係倣倣僺僢僠偱偡丅
丂GND偵崟丄俆V偵愒丄SIG偵敀傪偮側偓傑偡丅
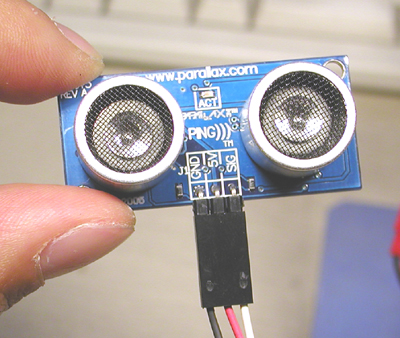
丂摨偠偔丄GND偵崟丄俆V偵愒丄俹俢侽偵敀傪偮側偓傑偡丅偙傟偱愙懕偼姰椆偱偡丅
丂儘儃僢僩偵庢傝晅偗傞偨傔偵斅嬥僷乕僣傪嶌傝傑偟偨丅巹偼捠忢丄俁俢亅俠俙俢乮俬俶倁俤俶俿俷俼乯傪巊偭偰傑偡丅傑偁丄偙偺掱搙偱偟偨傜俁俢亅俠俙俢偼晄梫偱偡偑丄僒僋偭偲嶌傟傑偡丅
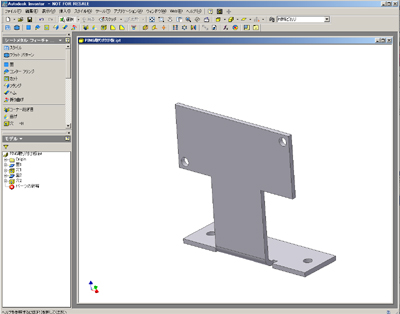
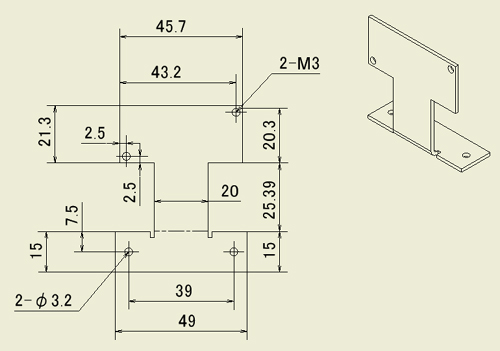
丂偁傑傝嶲峫偵側傜側偄偐傕抦傟傑偣傫偑丄堦墳丄揥奐恾傪嵹偣偰偍偒傑偡丅俙俿亅倂俙俴俲俤俼偵庢傝晅偗傞冇俁丏俀寠偼俁俋倣倣僺僢僠乮娫妘乯偵側偭偰傑偡偑丄偙傟偼丄懠偺儁乕僕偱柍慄婡傪庢傝晅偗偨僱僕寠偑俙俿亅倂俙俴俲俤俼偺忋晹偵奐偄偰偄偨偺偱偙偺娫妘偵側偭偰傑偡丅忋偺俀偮偺俵俁僱僕寠偼冇俀丏俆僪儕儖偱偁偗偨偁偲偵俵俁僞僢僾偱愗傝傑偡丅俵俁偺寠埵抲偼忋偺僙儞僒乕偺恾偺捠傝偱偡丅幚嵺丄俬俶倁俤俶俿俷俼偱偙偺捠傝偺僨乕僞傪擖傟偨傜栤戣側偔庢傝晅偗傜傟傑偟偨丅
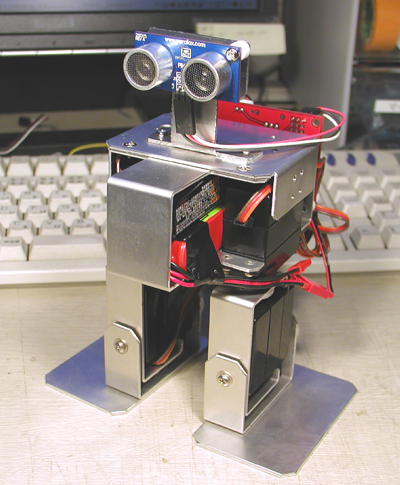
丂斅嬥僷乕僣傪庢傝晅偗偨偲偙傠丅
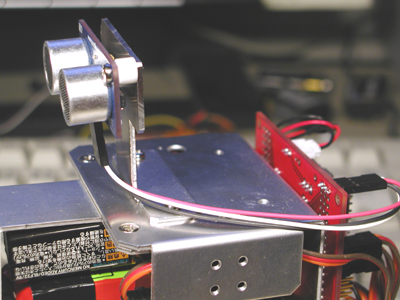
丂姰惉丅
丂側傫偲側偔倂倝倰倕倓俈偵帡偰傑偡偹偉丅偲偄偆偙偲偱乭側傫偪傖偭偰僉儑儘偪傖傫乭偲柦柤丅偦偆偄偊偽丄乽倂倝倰倕倓俈偱悽奅傪惇暈偡傞夛乿偵擖偭偰傑偡偑丄側偵傕妶摦偟偰側偄丏丏丏
僾儘僌儔儉
丂僾儘僌儔儉偼忋偱傕愢柧偟傑偟偨偑傕偆堦搙彂偒傑偡偲丄
丂侾乯俬俷僺儞傪弌椡偵愝掕
丂俀乯俬俷僺儞偐傜俆倳俽偺俫倝倗倛僷儖僗傪憲怣
丂俁乯俬俷僺儞傪擖椡偵愝掕
丂係乯俴倧倵偐傜俫倝倗倛偵側偭偨弖娫偐傜俴倧倵偵栠傞傑偱偺帪娫傪儅僀僐儞偺僞僀儅偱寁應
丂偲側傝傑偡丅
丂崱夞丄PB6傪巊梡偟偰傑偡偺偱PB6傪憖嶌偡傞偙偲偵側傝傑偡丅
丂壓偼僙儞僒偐傜偺嫍棧傪曉偡娭悢偱偡丅僐儊儞僩偑乽/*----俹俛俈偵愙懕偟偨...乿偲側偭偰傑偡偑俹俛俇偺娫堘偄丅
丂丂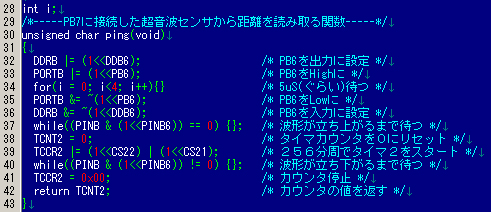
丂婎杮揑側偲偙傠偼乽擇懌曕峴儘儃僢僩惢嶌挻擖栧乿傪嶲徠偟偰偔偩偝偄丅杮偱夝愢偟偰偄傞丄儔僕僐儞偺庴怣婡偐傜偺攇宍傪撉傒庢傞僾儘僌儔儉偲傎傏摨偠偱偡丅僷儖僗暆應掕偵偼僞僀儅俀傪巊梡偟偰傑偡丅乮偁偲偱曕峴偝偣傞偑丄曕峴偵僞僀儅侽偲僞僀儅侾傪巊偭偰傞偺偱丅乯
丂億僀儞僩偱偡偑丄5uS偖傜偄偺僷儖僗傪惗惉偡傞偲偙傠偱丄偳偆傗偭偰俆倳俽傪嶌傞偐偱偡丅ATmega32偺僋儘僢僋偑侾俇俵俫倸側偺偱侾僋儘僢僋亖侽丏侽俇俀俆倳俽偲偄偆偙偲偱丄悢僋儘僢僋昁梡側柦椷傪慻傒崌傢偣傞偲偁偭偲偄偆傑偵uS扨埵偱偺帪娫偑宱夁偟偰偟傑偄傑偡丅杮偱偼倣俽扨埵偺僂僃僀僩傪嶌傞娭悢傪嶌偭偰偄傑偡偑丄摨偠傛偆偵僞僀儅僇僂儞僞傪巊偭偰uS扨埵偺僂僃僀僩娭悢傪嶌偭偰傒傞偲丄悢抣傪嵟掅偵偟偰傕侾侽侽倳俽偐偐偭偰偟傑偄傑偟偨丅
丂扨弮側倖倧倰儖乕僾傪峴偭偰丄僆僔儘偱寁應偟側偑傜挷惍偟偰傒傞偲 峴俁係 偺傛偆偵係夞偺儖乕僾偱栺俆uS偱偟偨丅偪側傒偵丄俉夞儖乕僾偱栺侾侽倳俽丄侾俇夞儖乕僾偱栺俀侽uS偲丄傎傏斾椺偟偰傑偡偺偱抁偄僂僃僀僩傪揔摉偵嶌傞偲偒偵偼傛偄偐傕丅
丂忋偺娭悢傪侾昩偛偲偵屇傃弌偟偰丄應掕寢壥傪弌椡偡傞僾儘僌儔儉偑偙偪傜偵側傝傑偡丅
丂ATW-PING1.c
丂乮塃僋儕僢僋偱懳徾傪曐懚乯
丂寢壥偼壓偺傛偆偵昞帵偝傟傑偡丅
丂丂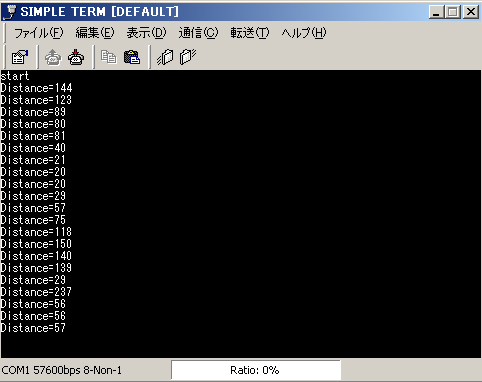
丂乮僴儅偭偨偲偒偵乯僆僔儘傪巊偭偨偺偱偮偄偱偵攇宍傕娤應偟偰傒傑偟偨丅侾俆們倣偖傜偄偺嫍棧偺応崌丄偙傫側姶偠偵側傝傑偡丅塃偺侾倣俽偖傜偄偺僷儖僗偼僙儞僒偐傜偺弌椡偱丄嫍棧偵傛偭偰暆偑曄傢傝傑偡乮塃偺曽偵怢傃傞乯丅
丂丂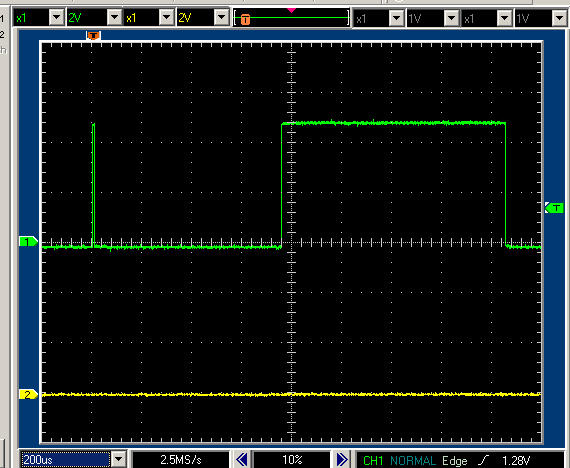
丂偙傟偱丄挻壒攇僙儞僒偐傜偺嫍棧僨乕僞傪悢抣壔偡傞偙偲偑偱偒傑偟偨丅
墳梡曇
丂杮偱偼摉慠丄曕峴偵偮偄偰偺僾儘僌儔儉嶌惉偵偮偄偰傕夝愢偟偰偄傑偡偑丄崱夞偺偲慻傒崌傢偣偰丄専抦偟偨嫍棧偵傛偭偰曕峴偡傞僾儘僌儔儉傪嶌偭偰傒傑偟偨丅
丂丂僾儘僌儔儉偼偙偪傜丂ATW-PING2.c丂乮塃僋儕僢僋偱懳徾傎曐懚乯
丂幚嵺偵摦偐偟偨偲偙傠偼壓偵側傝傑偡丅幨恀傪僋儕僢僋偡傞偲摦夋偵側傝傑偡丅俵俹俤俧侾偱栺係丏俉俵俛丅
丂塮憸偱偼丄偄偮偧傗嶌偭偨乽栰嵷宆僐儞僩儘乕儔乿傪偐偞偟丄堦掕偺嫍棧傪曐偭偰偄傑偡乮慜屻曕峴偩偗偱偡偑丅乯丅
丂丂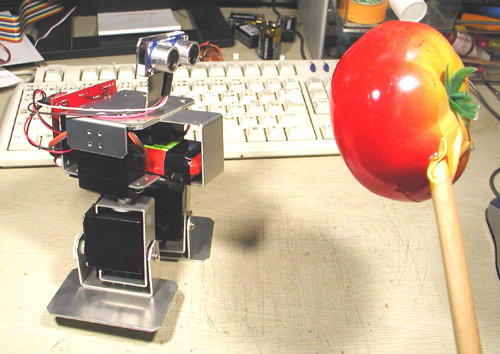
丂嵟嬤丄摦偔傕偺嶌偭偰側偐偭偨偺偱偡偑丄傗偭傁傝摦偔偲妝偟偄偱偡偹丅
俀侽侽俆擭侾侽寧俀俀擔
丂仸偙偺儁乕僕偱徯夘偡傞撪梕偼偁偔傑偱傕堦椺偱偡丅屄暿偺嶌惉偺偛憡択偛幙栤偼偍摎偊偱偒偐偹傑偡偺偱傛傠偟偔偍婅偄偄偨偟傑偡丅偙偺儁乕僕偲摨偠撪梕偵偮偄偰偺偛幙栤偵偮偄偰偼儘儃僢僩宖帵斅偵偰偍婅偄偄偨偟傑偡丅
|
| 丂 |
|