| ■ホビーロボット部品の製造・販売 モータコントローラ、センサ、音声、画像、無線モジュールなど、 ■ホビーロボット制作記事のページ (各種マイコン、PCとの接続事例) ■特殊メイク、特殊材料の販売 ※特殊メイクのコーナーはこちらに移りました。 |
|
| |Top(お知らせ) |製品紹介 |使い方とサンプルプログラム |通信販売 |リンク |ロボット掲示板 |会社案内 | |
| Easy Robotics for all enthusiastic people!!! ---HOBBY ROBOT PARTS SHOP ASAKUSAGIKEN--- Since 2003... |
|
ROBO-ONEへの道(二足歩行ロボットの製作日記)
|
|
はじめに 最近、ROBO−ONEに出場している方からもロボットパーツの注文を頂くようになりました。二足歩行ロボットの製作は非常に高度な技術と知識が必要と思われ、従来は大手メーカーの独占場でしたが電子工作ビギナーから始めても回をかさねるごとにROBO−ONEで良い成績を収める人もいます。浅草ギ研でもとうとうこの禁断の領域に足を踏み入れてしまいました。 他のコーナーとは違い、今回は時間の関係上HowTo形式にする余裕は無いため、日記形式で第5回ROBO−ONE出場までの過程をご紹介していきます。すでにエントリーは済ませてありますが2003/12/30現在ではまだハード60%、モーション0%の進行状態...間に合わなかったらすいません。 2003/12/30 試作の試作 小型機設計開始 12月上旬 試作 12月下旬 いきなり上旬から下旬に飛びますが、12月中旬は別件で他のロボをつくってました。 2003/12/24 2003/12/30 板金本気モード 2004/1/3〜5 皆様、あけおめ&ことよろということで年が変わりました。ROBO-CON関係は年々盛り上がりを見せており、04年はROBO-ONEがブレイクすればいいなーなんて年にしたいですね。先日行われた国際ロボット展ではROBO−ONE上位者によるバンダイカップがおこなわれて盛況でしたが来場者の方にアンケートを取ったところROBO-ONEの知名度はまだ低かったようです。 さて、オーカの製作ですが、年末までで一応歩行系の基本設計が出来たと仮定(仮定すんな、ちゃんとテストしろ、って感じですが)しまして、時間も押してきたので大会用のフレームを本気モードで作成開始しました。  RH17-13 RH17-13アルミ板ですが、いままで試作の試作で使っていたアルミは一般的に売られているやわらかいアルミでした。本番用機体作成は硬度の高い「A5052」アルミ板で作成することにします。材料はご同業の夢現工房さんのホームページより調達しました。普通のアルミは加工の感じがネトっという感じでこれはサクっという感じです。硬いのでバリの出も多くありませんので加工しやすいです。 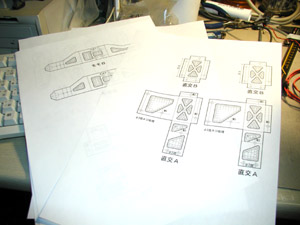 RH17-14 RH17-14いままで作成した展開図に軽量化のためのヌキのパターンを付けてプリントアウトします。今回、ヌキの方はフレームをカッコよくするという目的(強度も良いですが本当の目的はコレ)もあるので単純な四角や丸ではなく斜めのパターンを多く使いました。このようなパターンはこの大きさではハンドニブラも使用できないので3mmドリルでラインに沿って穴をあけてヤスリで成型します。書きあがったパターンを見て一言「結構死ねるかも...」。 お金の有る方はイトーレイネツさんのようなレーザー加工機のある会社におねがいした方が無難でしょう。「おいらは工業高校生で金はないけど体力はある。」という方は是非挑戦して死んでみてください。なにかが見えるかも...(私は後半の方で携帯電話が鳴るという幻聴になやまされました。) すでに穴位置を書き上げた段階でクララ状態になりました。ちなみに視力を短時間で回復するには遠くの星を見ると良いそうです。 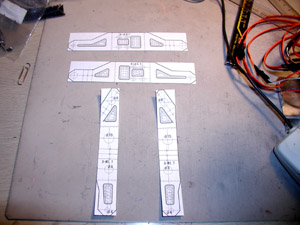 RH17-15 RH17-15展開図はカッターで切り抜いておきます。 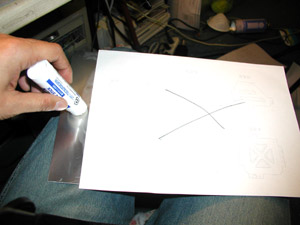 RH17-16 RH17-16アルミ板は購入時に表面保護のビニールがついている場合もありますが、A5052はついてないので裏面を不要な紙などを貼って加工時にキズが付かないようにします。貼り付けには普通のノリを使っていますが他のROBO-ONE出場者の方でプリンタで印刷できる大きなシールに印刷して貼り付けている人もいました。  RH17-17 RH17-171.5mm厚板に展開図を貼り付けたところです。厚さは板金では「t=1.5」のように表示します。各パーツ同士の間隔があいていて板がもったいないような気がしますが、PCBカッターではまっすぐに切るのは難しいので余裕を持たせています。適当に切った後にカンナで削るようにして切った方が精度が出せます。バンドソーだと問題ないと思われますが。 ちなみにホーザンのPCBカッターにはまっすぐに切るガイドがついていますが大きさが制限されるので使ってません。 今回、板厚は板1枚で支えるような構造には1.5mm、サーボを取り付けたり箱型にするようなところは1mmを使用してます。  RH17-18 RH17-18腕以外の全展開図を貼り終えたところです。(深夜)  RH17-19 RH17-19切削加工時にはアルミ用カットオイルをつけて作業します。PCBカッターの場合にはオイルをつけないと板半分ぐらい切るとギョーという音がしてきてそのうち板がブレだします。面倒でもこまめにオイルを塗った方が精度的にも工具を長持ちさせる意味でも良いでしょう。ネジタップを切るときにもこまめにオイルを付けます。 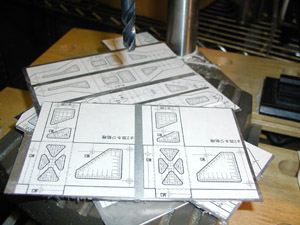 RH17-20 RH17-20次に穴あけ&タップをしますが作業しやすいような大きさに適当にカットしておきます。カット後はセンタポンチで中心を打っておきます。センタポンチは始めにポンチを当てる位置と、打つときにポンチが垂直になってないか、とカナヅチをポンチの中心に垂直に当てることに全神経を集中しながら行います。集中力が切れてきたら休みを入れましょう。中心がズレて作り直しよりも時間はかからない結果になると思います。(あと寿命が延びます。)  RH17-21 RH17-21作業時、特に夜はカゲで死角が出来ないようにライトを2個以上つけながら作業するのが良いでしょう。「ロボットは夜作られる」というようにおそらくほとんどの人が夜作っていると思います。 全然関係ないですが、私はラジオ派なので深夜放送を聞いてますが最近日曜か土曜の深夜にインターFM(76.1MHz)でスネークマンショーやってますね。中学校のころは熱中してましたが、今聞くとあんまりおもしろくないです。でもYMOがかかって昔を思い出しました。昔を思い出すようになったら人間おしまいです。  RH17-22 RH17-22センタポンチ後はセンタードリルでさらに中心にを入れます。これをやった方が穴あけ時にドリルがブレずらいのですがセンタードリル自体がブレてしまう場合もあるので諸刃の剣です。これも集中力いります。集中力が切れたらルイボスティーがおすすめ。 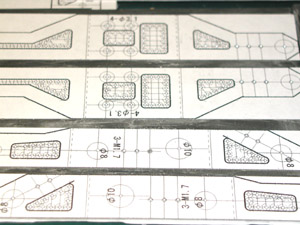 RH17-23 RH17-23写真ではみえづらいですがセンタードリル後です。この後、またまた集中しながらドリルをあけていきます。径の小さいドリルは歯が滑らないように注意します。径の大きいドリルはゆっくり下げないと中心がズレます。特にノスドリルは6.5mm以下の口径の卓上ミニボール盤では中心にいっていてもブレる場合がありますので抑えている手にも力を入れて固定する必要があります。ちなみにハンドリーマでこの数をこなそうとすると普通の人は体力が持ちません。 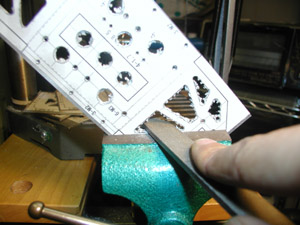 RH17-24 RH17-24ヌキの部分はヤスリで成型します。荒いヤスリが入る大きさの場合は荒めのヤスリでかけたあとに細かい目のヤスリで表面を平らにします。  RH17-25 RH17-25私は写真の模型屋でよく売っているタイプのヤスリをよく使います。反対側が半円形になっているので丸い部分の成型にもつかえます。本当は板の反対側にも手を添えて平行を出します(カメラ撮っているので片手。以下このページ全部同じです。) ヤスリ時には印刷した紙と後ろに貼った紙がじゃまでラインがみえずらい場合がありますがニッパなどで紙クズを取り去りながら作業し、なるべく線に沿って成型していきます。  RH17-26 RH17-26ヤスリが届かないような細かい部分はリューターで成型します。ヤスリやリューターを使うときには細かいアルミ粉が出ますので防塵マスクとメガネを着用しましょう。 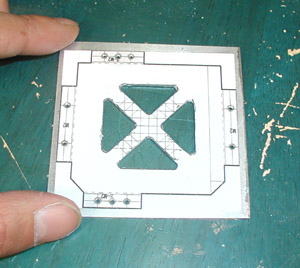 RH17-27 RH17-27 「ジャンクロードバンタムが人間核弾頭ならおいらは人間レーザー加工機だな。ニヤリ。」などと言いつつ腰が死亡したので今回はこの辺でカンベンしてやります。 ちなみに私は腰痛対策で腰痛ベルトやコルセットを巻いて作業していた(腰の寿命が全然違います。一晩は楽に行ける。ちなみにノーマル状態での寿命は1時間)のですが正月にヨメのおとうさんに「そんなもん役に立つか!サラシを巻け!」と言われてサラシをもらったので使ってみたのですがコルセットなんかより全然イイです。骨盤が開きません。但しトイレは近くなります。 2004/1/6 最近は気が付くと朝になっているという毎日ですが朝になるとミョーに眠くなくなります。そんな時は難しい本を読むかNHKを見て眠気を誘うのですが、今日のNHKでASIMOの開発している人へのインタビューがありました。現在は認識関係を強化しているということで、カメラの映像から個人を特定したり、指を指して「こっちへ行け」というとその場所へ移動したりしてました。NHKのアナウンサーはこれを見て「将来、老人が増えたらこういうロボットで介護なんかできますねー。」と言ってました。また介護かよー。やっぱりロボットはバトルでしょー。 とやさぐれたのは置いといてオーカの続きです。  RH17-28 RH17-28ヤスリ終了ー。二度とやりたくありません。  RH17-29 RH17-29次はカットです。前にも言ったとおり、ガイドは使ってません。実際には両手を沿えてます。写真を撮っているのでいつも片手しか写ってませんのでご注意を。 カットは穴あけとは違い、多少ズレても問題ないので気楽に行けます。  RH17-30 RH17-30凹ブはできるだけ余白をカットした後にハンドニブラで切り取ります。PCBカッターではこうゆうところは切れません。  RH17-31 RH17-31カット終了ー。必要であればヤスリなどでバリ取りを行います。 次は曲げ加工です。  RH17-32 RH17-32ホーザンのK130折り曲げ機は両脇にある固定ネジを締めるときに黒い部分がズレることがあります。この段階でズレると泣くに泣けないのでバイスを追加して固定します。真中に見える灰色の2個がそうです。  RH17-33 RH17-33曲げたらその都度、デジタルノギスで測定し、ズレを修正します。デジタルノギスはサーボの大きさを測ったりにも使うので必須アイテムでしょう。 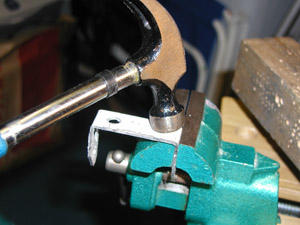 RH17-34 RH17-34ズレはカナヅチでたたいて修正します。  RH17-35 RH17-35曲げ終了ー。  RH17-36 RH17-36貼り付けた紙をはがします。お湯につけると簡単にはがれます。 ついでに自分も風呂に入れば一石二鳥。これで「一緒にフロに入った仲」になりました。 2004/1/7早朝 2004/1/8 アルミの塗装 アルミの加工品は表面にキズがつきにくくするためにアルマイト加工という表面処理をするのが一般的です。最近ではJinSatoさんのように個人でアルマイト加工に挑戦する方も出てきました。 アルミは塗装のノリが非常に悪いため、アルマイト加工時に着色をするというのが一般的ですが、特殊造形もウリにしている浅草ギ研としてはあえて塗装に挑戦してみます。 「挑戦」ってやったことないの?ええ、初めてですが!(逆切れ) 上手くいくかは神のみぞ知る...  RH17-37 RH17-37お湯で洗ったので良く乾燥させます。食器乾燥機があると便利。(私は造形用に食器乾燥機を使ってます。ちなみに本当の食器は布巾で拭いてて、この乾燥機は使ってません。シンナーくさいので) アルミの塗装の基本的な流れですが 1)表面をサンドペーパーなどで荒らしておく。 2)アルミ用(またはアルミにも適用できる)サーフェーサーを塗る 3)塗料を塗る という流れのようです。アルミへの塗装をする人はあまりいないので、これらの塗装用品を販売しているところは限られますが、自動車用品店(アルミホイルの塗装)や鉄道模型店などで塗装キットが販売されているようです。 サーフェーサーはプライマリーサーフェーサー(プラサフと言ったりする)ということもあります。  RH17-38 RH17-38今回は私が造形でよく使っているアクリル塗料を使用することにしました。写真のアクリラというものは金属に塗る為のサーフェーサーがあります。写真右の缶がアクリラ用のサーフェーサーで商品名を「メタルプライマー」といいます。これらは画材屋で売ってますがメタルプライマーは在庫持っているところは少ないと思いますので注文してください。店によっては「アクリル塗料はアルミに塗れないよ。」と言われたりするかもしれませんが黙って注文しましょう(経験談)。缶にはアルミに使用できると書いてあります。  RH17-39 RH17-39まず、600番ぐらいのサンドペーパーで表面を荒らします。3Mのスポンジペーパーが使いやすいです。模型店で売ってます。  RH17-40 RH17-40ついでにバリなんかも取っておきましょう。小さい穴のバリは大きいドリルをかるーくまわしてバリを取ります。強くやるともともと薄い板がさらにうすくなりますので、ネジを切ったところなどはネジの巻きが減ってしまうので注意しましょう。  RH17-41 RH17-41あぶないカドもヤスリでけずってとっておきます。  RH17-42 RH17-42荒らし終了ー。  RH17-43 RH17-43念の為、手の油がついているので取り去ります。こうゆうのを脱脂(だっし)といいます。ホワイトガソリンかベンジンか無水アルコールで洗うことができますがホワイトガソリンが一番安いです。登山洋品店で買えます。これを手でさわったらアホですのでビニール手袋などをして直接触らないようにしましょう。 (臭いので外でやってます。朝4時。寒い...)  RH17-44 RH17-44メタルプライマーを塗ります。もちろんエアブラシ使用。メタルプライマーは透明ですので塗れているかよくわかりずらいです。色をつけといてくれるといいんですがね。プラモのサーフェーサーみたいに。  RH17-45 RH17-45着色する材料です。アクリラは水性絵の部のようにチューブに入っています。基本的には絵を書くための塗料なので筆塗り用なのですが、写真左のソルベントという薄め液で薄めるとエアブラシで塗れるようになります。濃さを自分で調整しなくてはならないので何回か練習して感覚をつかんでから本番にのぞんだほうか良いでしょう。 奥にあるのはリムーバーというものでエアブラシを洗う時に使います。 色ですが、サーボMICRO−MGの線の色がオレンジ・赤・黒なので線が目立たないようにオレンジにしました。あんまりオレンジをパーソナルカラーにしている機体も無いと思いますので勝手にパーソナルカラーをオレンジに宣言させて頂きます。  RH17-46 RH17-46ブシューとやります。さすがに塗装は昼間やりました。 アルミは銀色なのでオレンジのように明るい色は一回塗ったぐらいではちゃんとオレンジになりません。暗い色になります。時間掛かりますが2度塗り以上をお勧めします。今回はオレンジの部分は3度塗り、その他は2度塗りしました。食器乾燥機で乾燥させながらやると速いです。  RH17-47 RH17-47塗装終了ー。 塗装後の重量変化  RH17-48 RH17-48せっかく肉抜きしたのに塗装したら重くなります。ということでどのぐらい重くなったかを測ってみます。 腕部はまだ本気板金してないので足部と外装が無い胴体部の合計を測りました。結果は下の通り。 塗装前−>171g 塗装後−>175g 裏面も塗ってますので「全面塗装をすると約2.3%重量が増える」結果となりました。条件によって違うと思いますがまあご参考までということで 。 ちなみにこの時点で、 ・腕は未塗装 ・外装無し ・秘密兵器Gパーツなし ・バッテリ込み ・基板込み で全体重を測った結果は約890gでした。イエイ。 下半身の組立て とりあえず下半身だけは確定ということで組み立てます。 ネジは全てネジ止め剤を使用します。タミヤのネジロックをつかってます。これって良いにおいですよね。なんでですかね? 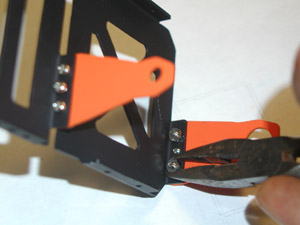 RH17-49 RH17-49足ひらは板金のしやすさの為、2パーツになっているのでサーボホーン取り付け板をがっちり固定する必要があります。こんなところはネジロック塗ったうえにウラからナットで強ーく締めます。万全を期すために3連にしたらスパナが入らなくなってしまいました(設計ミス)のでしょうがなくラジペンで締めてます。 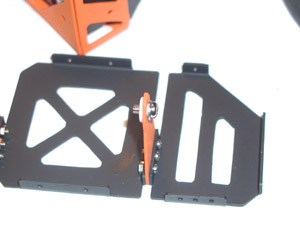 RH17-50 RH17-50オーカの軸受け部は上の写真のようになってます。わかりずらいですが右から M3L5ネジ−菊ワッシャ−オレンジの板−テフロンブッシュとなりその後に止める場所がきます。止める場所のネジ穴にはネジロックを塗っておきます。 テスト歩行時にはこんなかんじでゆるみなく動かすことができました。菊ワッシャは内側タイプです。テフロンブッシュは内径3mm、外径4mmの円筒に6mm径の円盤がついているものを使用しています。オレンジの板には4mmの穴があいていますので厚入します。塗装をしているので穴が4mmよりも若干小さくなっており少しきついぐらいでちょうどよく圧入できます。塗装していなくても圧入しても取れずらいです。  RH17-53 RH17-53必要に応じてサーボホーンも加工します。写真上のサーボホーンは片側だけ穴2個分をカットしてます。  RH17-51 RH17-51そうこうしているウチに新型サーボコントローラ(試作)が出来ました。写真左です。当社比(写真右)で約半分ぐらいの大きさになりました。12個までのサーボをシリアル通信でコントロールし、ロータリースイッチでサーボチャンネルのベース番号を変えることによりシリアル線を共有でき、最大で16ボード×12個=192個のサーボを1本のシリアル線で動かすことができますが、そんなに動かす人いないと思いますが。 このコントローラは近日発売予定です。ちなみに現行のものとは違い、 「シンクロバイト」「サーボ番号」「サーボ位置」「スピード」の4バイト(従来は最後が無くて3バイト)を送信することでコントロールします。通信速度もH8やSHなどの最近のマイコン(っていつと比較してんだ?)は速い速度でシリアル通信が出来るので9600以上にも対応する予定です(まだ仕様決定してません。写真のはテスト用の試作品。でも大きさはこれで決まりです。)  RH17-52 RH17-52腰に付けて見ました。5mmスペーサが間に入っています。  RH17-54 RH17-54モモから下です。  RH17-55 RH17-55 腰から下完成ー。なんかオレンジベースにしたら工事現場みたいになっちゃいました。 部屋がシンナー臭くて(アクリラのリムーバー)前歯が抜けそうなのでゴミをすてました。今日がゴミの日でラッキー満開。 2004/1/9早朝 2004/1/10早朝 なんかマウスが不調だったのでひさしぶりにPCの電源を切ったら...遠い世界に逝ってしましました。 板金CADデータのバックアップ取ってない。歩行サンプルモーション消えた。その他もろもろと一緒に... 心が折れました。 マジで間に合わないかも... See you never! つづく?
秘密兵器の作成 2004/1/12-14  RH17-65 RH17-65それで出来たのが型です。今回、後頭部はFRP、顔面はフォームラテックスかマスクラテックスにします。FRPはシリコン型、ラテックスは石膏型が必要です。写真左は後頭部用のシリコン凹型、右は顔面用の石膏凹型です。フォームラテックスの場合には石膏の凸型も必要になります。この辺は段取りがややこしいですが本に書いてあります。  RH17-66 RH17-66FRP作成には上記のような道具を使います。FRPはファイバー・リインフォースド・プラスチックの略で、直訳すると「繊維で強化されたプラスチック」という意味です。繊維で強化するのでなんの繊維でもFRPですが一般的にはガラスで織ったガラスクロスかカーボンファイバーを繊維として使います。プラスチックは通称「ポリ」や「リゴラック」と呼ばれる液体プラスチック原料を使います。リゴラックは浅草ギ研でも販売しています。 本来はバイクのカウルなどのように大きいもの用なので型にガラスクロスをダーとひいてハケでリゴラックを付けていきますが、このような小さいくて凹凸がある場合にはガラス繊維を小さく切って貼っていくという方が上手くいきます。 今回、ガラスクロスは細めのものを使用していますので3〜5重ぐらいに貼らないと十分な強度が得られません。  RH17-67 RH17-67後頭部完了ー。冬なのでなかなか硬化しないです。時間短縮のために食器乾燥機で丸1.5日乾燥させました。部屋がシンナー臭いです。  RH17-68 RH17-68顔面完了ー。フォームラテックスはプロでも成功率が50%前後と、非常に難しいものです。私も写真の前に一度失敗してます。必ず失敗すると仮定して、一度目はデータ取り(ミキサーであわ立てる時間とか、オーブンで焼く時間と温度とか)と考えたほうが良いでしょう。私は一度目は生焼けだったので二回目は温度を100℃から110℃へ変えて同じ時間にしたら成功しました。室温以外にも湿度なんかでも影響がでます。 フォームラテックスをご存知ない方に簡単に説明すると、ゴムの原料に数種類の薬品を入れてケーキを作るときのミキサーで泡立て、石膏型に流し込んでオーブンで焼くとケーキのゴム版ができます。触感は人間の皮膚に似てますので表情を動かすことができます。本来は接着剤で顔などに貼る変装用の皮膚をつくるのに使います。
2004/1/15 顔面骨格の作成 今日は昼間仕事だったので作業は夜からになりました。その前に例のタイガーマスク接骨院にいって腰をリセットしてもらいます。  RH17-76 RH17-76仕事をしている間に、皮膚の内側の骨格、つまり顔面の骨格をFRPで作って乾燥させてました。ついでにフォームラテックスで上手く動かなかった場合を考えて、マスクラテックスで顔のバックアップを取っておきました。 写真左から「後頭部の骨格(FRP)」「顔面の骨格(FRP)」「顔面の皮膚(マスクラテックス)」です。 マスクラテックスはようはゴムです。液体のゴムを石膏型に塗って(何度か塗る)乾燥させるとゴムマスクが出来ます。マスクラテックスでのアニマトロニクスヘッドは何回か作っているのでこれで動かすのは簡単ですがフォームラテックスにくらべて硬いので表情の動きが小さくなります。  RH17-77 RH17-77頭の骨格ができたので組んでみました。これはフォームラテックス版です。この後、塗装します。というか顔面は塗装というよりも化粧に近い作業になります。フォームラテックスの着色はグリースペイントというものを使いますがこれはほぼドーランと同じです。  RH17-78 RH17-78左がマスクラテックス、右がフォームラテックスです。  RH17-79 RH17-79フォームラテックスは2mm厚の石膏凹凸型で2mm厚にしてます。いろいろやった結果、小さいアニマトロニクスヘッドは2mm厚ぐらいがイイ感じで動きます。 無線BOX、電池BOXの作成 つづいて、残っている板金パーツを作りました。(つーか、まだ終わってないの?)  RH17-80 RH17-80背中には無線機を背負わせます。この無線機は某用途で開発されたがお蔵入りになったものを若干修正して9600bps(その前は4800だった)にしたものです。特徴としてはロータリースイッチで周波数を変えられるので、同一周波数でID切り替えという方式よりも混信に強いということがあります。スイッチは256ch分かえられるものがついてますが、有効なのは80chぐらいです。但し、となり同士の周波数は混信する可能性があるので同時使用時に実際に有効なのは40chぐらいです。310MHz帯の微弱無線です。 これも近日中に発売予定です。 ちなみに日本の法律(総務省が管轄している)では、無線を使用するときには免許が必要です。一般的に販売されている無線機や無線を使った機器は「微弱無線」か「特定小電力無線」というものです。微弱は出力が弱いので免許を免除されているもので、電話の子機などに使われています。特定小電力はそれよりも出力が大きいもので、メーカー側で無線の使用許可に相当するような申請をそのむねの機関に申請して許可を取っているものです。  RH17-81 RH17-81カバーをつけてアンテナをつけてみました。アンテナは最近入荷した310MHz用のヘリカルアンテナです。これが来るまでは秋葉で売っていた400MHz帯のアンテナを使用してテストをしていましたが、某D師匠が言うには「混信なんかはアンテナの性能でも決まる」、との事。D師匠にはこの無線機に関して多大なるご協力を頂いてます。いろいろ無理言ってすいません。めんどくさーい配線をやってくれたN村さんにも感謝。 ちなみにカバーは未塗装です。 そういえば、J−Classにもエントリーしました。J−Classは有線なのでこのユニットは外します。本戦のみ使用。 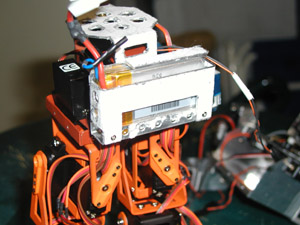 RH17-82 RH17-82腰の横につけてみたLi−Poバッテリケースがカッコ悪かったので腰の後ろに付けました。この上に転倒時対策のクッションをつけたら丁度イイかも。  RH17-83 RH17-83板金パーツ終了ー。 上半身は未塗装ですが、この後におよんで塗装なんかしてるバヤイじゃないのでとりあえずこのままとします。J−Classはこのまま出るかも。カッチョ悪ー。 ヘリカルアンテナがビー○サーベルみたいっすね。反対側にもダミーのアンテナつけて、試合中に抜くってのはどうでしょう?右手でつかめるし。(つーか抜いてどうする? 答え:相手をビビらせたあと、元にもどす。ウソです、そんな時間無い。) この後、とりあえず歩行テストしてからSTAMPなどの電子機器を取り付けます。というか、あとはSTAMPと上半身用のサーボコントローラしかないんですけどね。 この状態で重量は1075gでした。TOTALで1.1kgぐらいになりそうです。 つづく 2004/1/16(やはり早朝) メインボード(笑)の作成 音声回路のテスト オレ的コントローラの作成 2004/1/21 大人気ない足の作成 J−Classの日も近づいてきたのでレギュレーションを確認しようとROBO−ONEのホームページを見たら、J−Classは足のサイズがでかくてもよいじゃないですか! ということで大人気ない私は大人気なく、足ひらをでかくしました。  RH17-106 RH17-106こんな感じです。足の長さは足が前後左右に動く部分から床までの長さを測ります。オーカの場合はヨー軸が一番上にありますのでこの部分はカウントされません。その下のロール、ピッチ軸(オーカは軸直交になってます。)から床までとなり150mmですのでJ−Classでは足ひらは150mm以下の長さになります。 ちなみに、ヨー軸とは人間の頭でたとえると後ろを振り返るような動作の軸になります。ピッチ軸は一気のみするような動き(またはうなずくとか)、ロールは耳を肩につけるような動きをする軸になります。 軸直交とは2つの軸が直交している状態をいい、このようにサーボを配置した方が、計算でサーボの回転角度を求めるときに式が簡単になるというメリットがあります。が、オーカの場合はそんな計算してませんのである意味無意味です。軸直交にしなかったら足の長さがもっと短くできますので安定した歩行が見込めるでしょう。しかし、よく考えれば軸直交にしても足をみじかくするような配置もできます。姫路ソフトワークスのHSWK01などはその良い例です。今回のJ−Classにはこれの改良型がでるみたい(エントリーNo2はどうみてもこれですよね)なので強敵です。ツクモロボット王国においてありますので研究してみるのも良いかも。  RH17-107 RH17-107J−Class用の機体完成です。G型じゃないのでGパーツはつけません。(つーかまだできてません。) 本戦用の足裏の作成 ROBO−ONE本戦では足裏の長さが「足が縦横に動くところから床までの70%」という規定があり、現在のJ−Class用のものでは規定を満たしません。ということで足裏を再度作り直します。また、大会に出て「重心が後ろにある」というのは分かっていましたが皆さんが足ひらを後ろに伸ばしているのを見て、人間の足のように作ってはいけないというのがわかりましたのでこの点も考慮に入れて後ろに長く作成しました。  RH17-123 RH17-123もう時間が無いので簡単につくりました。今回は多くの方がやってるようにコの字型のブラケットを板につけるという方法です。バランスがどうなるかわかりませんので70%の範囲でできるだけ大きく作りました。  RH17-124 RH17-1244点でネジ止めしたところです。板厚が1mm(A5052使用)なのでM3ネジ(直径3mmネジ)でとめるとネジのらせんの数が少なくなるのでM2ネジを使いました。但し、市販のM2ネジはL3(ネジ長3mm)からしは売ってませんので1mmと1mmの板で底に1mm突き出てしまいます。  RH17-125 RH17-125こんな感じで。出てます。ちょっとわかりずらいですかね。  RH17-126 RH17-126他の方はどうやって対策しているのか分かりません(M2L2というネジがあるかも)が、私はリュータで削り、平らにしました。  RH17-127 RH17-127平らになったところです。 やってみて、強度に不安があるような気がしますのでアルミロウ付けをすることにしました。。  RH17-128 RH17-128まず、バーナーで接合するアルミ板両方を均等に熱します。板厚が違うもの同士などの場合は厚い方を先に熱してなるべるパーツ同士が同じ温度で上がっていくようにします。 写真のバーナーは家庭用のカセットコンロが使えるヤツで、2000円ぐらいで購入しました。(ボンベは別) このような作業をする場合は下に耐火レンガをおいてやりましょう。これらの道具はDIYか彫金屋で入手できます。 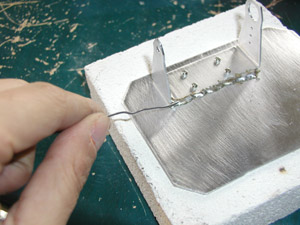 RH17-129 RH17-129このような厚さの場合、5秒ぐらい熱したら接合部にアルミロウを押し付けると接合できます。ハンダ付けと同じ要領です。板が十分熱されてないか、表面に汚れがある場合は玉のようになって間に流れなくなるので注意して下さい。 アルミロウはDIYなんかでよく硬アルミロウが売ってますがあれはダメです。強度がありますが、融点温度が高すぎて1mm厚ぐらいのあるみではロウが流れる温度になる前に板が溶けます。アルミハンダが融点が低くて使いやすいです。私はラジデバの1F表の道具屋で買いました。あまり売ってるところ無いです。  RH17-130 RH17-130さわれる温度になるまで待って、金ブラシで汚れを落とします。温度を下げるのに、バケツに水をおいといた方が早く作業できるでしょう。 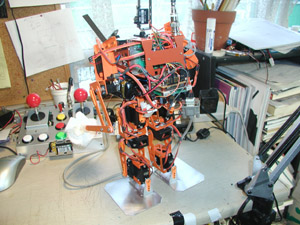 RH17-131 RH17-131とりあえずのこりのパーツを付けて見ました。これはうしろ。だいぶ、ぶっさいくになり、急速に愛着が失われていきます。が、あまりにもモーションがダメなのでとりあえずこのままテストしていきます。  RH17-132 RH17-132前です。背中もでかくなって、かなりトップヘビーになってきました。これより大きな足であるかなかったのに大丈夫でしょうか?  RH17-133 RH17-133アンテナはランドセルの支柱につけました。ビームサーベルみたいな。  RH17-134 RH17-134無線も作業場では絶好調。あとは現地でどうなるか。
2004/1/28 今日は会場で取材の日です。メタリックファイターの森永さんや、A−Doの森口さんが来てデモをする予定になってます。 大会前日−規程動作作成 2004/2/29 予選参加規程の自立歩行「歩行5歩、10秒以内(片足は浮いている)」「屈伸」「左右ステップ(片足は浮いている)」 を作成します。バランスを変えてだいぶ動きが良くなりましたがMICRO−MG使用片足6軸という構造だとやはりモーションを作りこまないと確実に倒れないで動かすことは難しいです。半日ぐらいかけて「連続で動かしても5回に1回は倒れる」というところまでやってとりあえずコレでよしとしました。予選参加審査は5回までチャレンジすることができますので大丈夫でしょう。  RH17-138 RH17-138いままで、モーションを作成するときには片手で倒れないようにささえながらやっていたのですが、ロボットをつっておくと楽にモーションが作成できます。これは前の日の撮影時にA−Doの森口さんがロボットをつるす台を使っていたのを見てマネしました。(後に大会出ましたがそのような台を作っている人は沢山いました。)写真は台をつくる余裕が無かったので近くのDIYの店でL字金具を買ってきて柱にタッピングネジで止めたところです。 余裕が無いときにはこうゆうのに気がつかずに、無駄な力を使ってしまいます。これで肩こりが緩和されるでしょう。  RH17-139 RH17-139これも前の日の撮影のときに、メタリックファイターの森永さんから「サーボのケーブルで断線しずらく、やわらかいもの」を探しているという話を聞いて、完成度の高いマシンが線ごときになやむのかー、と軽く考えてましたがモーションを色々作っていたら私も切れました。 ケーブルですが、私の使っているサーボでは1Aぐらい流れますのでそれなりに太い線じゃないとダメです。買う時に店の人に「コレ何アンペアですか?6Vですけど」と聞くと教えてくれます。普通は1A、3A、7A用があります。これより細くてよく曲がるものもありますが細いと切れたり電流が流せなくなったりするのでまずいです。 ツクモROBOT王国では「高屈曲ワイヤー」という、よく曲がるが中の線は沢山入っているものもあるようです。一度試してみたいですね。 顔仕上げ 色々なトラブルが重なり(よくあることらしいですが)、肝心の顔をまったく仕上げてません。通常は後頭部をパテ埋め&ペーパーがけなどをして仕上げ、薄いマジックテープ(3Mのメカニカルファスナーってのが良い)を使って顔面を脱着できるようしにた上で内骨格にサーボをつけて動かすのですが、時間が無いのでホットボンドで接着してしまいました。これをやってしまうとせっかく作ったフォームラテックス製の顔が使い捨てになってしまいますがしょうがありません。貼り付けもズレると修正できません。あと、中でサーボと内骨格の接着が取れるとその時点でアウトです。  RH17-140 RH17-140とりあえず貼ってみました。稼動部分は口で、開く−閉じる、としかめっつらをするのが出来ます。歩行モーション時に口の開閉をさせたら一歩ごとにふんばっているような感じが出てイイ感じです。 その後、威嚇動作(腕を上げて口を大きく開く)や、パンチ動作(パンチ出した後、しかめっつらする)と連動させてみました。 貼り付けは、案の定ちょっとズレてしまいましたがやり直しできません。 デカール作成 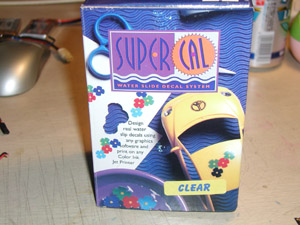 RH17-141 RH17-141最後にデカール作成を行います。デカールはアメリカのMicroFormat社のキットを使いました。これはコトブキヤで売っています。  RH17-142 RH17-142 こんな感じで、フロントパネルに「桜花」の文字を入れます。インクジェットで専用紙に印刷した上にキットに入っているスプレーをかけてよく乾燥(一晩ぐらいが望ましい)させるのですが、時間短縮で食器乾燥機に55分かけたら写真のようにツブツブが入ってしまいました。もう一つ注意点ですが、インクジェットプリンターは「白」はインクを出さないので、黒地に白というようなデザインだと出来上がりは黒地に透明になってしまいます。上の写真の白抜きに見えるところはうっすらと黄色にしています。黒地に透明ヌキでは黒いアルミパネルに貼った時に文字が見えません。 下のピンク星マークは戦闘機の桜花風のものです。戦闘機の桜花はバカな兵器(実際にアメリカ軍にはBAKABOMBと言われていた)ですがデザインは非常にスキです。スターウォーズに出ててもおかしくありません。カッチョイー。 二回目は体力の限界を感じたので乾燥機(タイマー30分)にかけたまま寝ました。貼り付けは会場で行う予定(でした。) 第5回ROBO−ONE大会予選 2004/1/31 大会は混むよ。と聞いていたので早く行って控え室(会場のパーテーションの裏)の良い場所を取ろうとおもって9時前に会場に着いたらすでに半分ぐらいの参加者がきてました。控え室に着くと自分の番号の席にすわるようになっていて別に早く着ても良い場所が取れるわけではないことがわかりました。 自分の席で準備をしていると、「予選前の参加審査は自立動作だって。どうしよう。」と言っている人がいました。レギュレーションはROBO−ONEのホームページでよく読んでおいたほうが良いです。特に他のROBO−CONと違い、徐々に難しくなっていくので注意が必要です。 そんな人を尻目に自分は今度は大丈夫だろうと思っていたらまたやってしまいました。 会場に着いて電源を入れると変な動きをします。よくしらべたらプログラムのデートスタンプが昨日の17時になっています。昨日は最終確認を終えたのが夜の12時ぐらいです。デカールはその後やってました。一週間前にアホなことをやっているので今度は落ち着いて対応しようととりあえず一服して気を落ち着けました。審査は10時30分までです。 データを調べたら数値データだけはTXTで保存されていました。 まだ戦えます。 数値データは歩行の瞬間のデータだけ(新型サーボコントローラが逝ってしまったので)なのでモーションのステップ間の時間は調整する必要があります。審査は5回受けられますが、不安なものをやるよりも一発勝負で良く調整したもので審査を受ける方向でじっくり調整することにしました。10時20分まで調整を行って審査を受けたら一発でOKでした。 当日は色々な方が現地でトラブっていたようです。しかし、あきらめない気持ちが肝心と思いました。 その後、調子に乗って顔のモーションなんかを作っていたら案の定、アゴの接着が取れてしまい顔が動かなくなりましたがとりあえず予選に出れるだけで良しとしました。 予選の順番はクジですが、今回は7番目と早めです。 予選は今回新しく作られた「ロボコンマガジンの上り下り」を行わないと決勝に行くのは難しいような感じでした。新しく作られた規程なので皆さん苦労されてましたがグレート不知火なんかは5冊昇ってました。 すげー、と思っていたらOmniStrikerなんかは10いってました。ちなみに桜花は昨日の時点で昇ることはできましたがデータ無いので規程動作(歩行、横ステップ。屈伸またやり忘れ)だけ行いましたがビリではなかったようです。んー。ちなみに無線やCPU(BASICスタンプ)は問題なく動作してました。 今回は、本ののぼりおりは出来ない人もいましがた、できなくても挑戦すると点数がすこしでもつくような感じでしたので次回は規定演技は絶対に挑戦した方が良いと思いました。たぬたぬは倒れて昇る(アクションがかなりかわいいです。会長が写真取ってました)というもので審査員のコメントは「あれはどーなんでしょーか」なんて言われてましたが規程では「上り下り」しかありませんでしたので有効だったようです。結構点数ついてたと思います。 予選で結構多かったように見えたトラブルとしては、派手なパフォーマンスをしたときに電流が沢山流れてCPUがコケるというのがあったようです。 10位までの結果は 1:OmniStriker 2:MetaricFighter 3:ヨコヅナグレート不知火 4:バーニングスター 5:2325−RX 6:TAEKWON−V 7:Ultra−Chopper 8:ARIUS2 9:マジンガア 10:ちょんまげの啓三 となりました。 ウチのユーザーではZIPPONさんのMAGI(腕にMICRO−MG使用)が22位、SISOさんのG−Tune(MICRO−MGとS03T使用)が29位でした。MAGIは軸数多くて結構身長ありますが重さが1.4kgと非常に軽量です。G−Tuneは飛行機の形に変形できます。Dr−GIYさんと「今度は合体なんでどお、不知火のウィングになるとか」なんて言ってましたがそうなるとまさにスーパーロボットですなー。 その他の気になるロボットですが、前回優勝のA−Doはかなりカッコいい外装がついててみんなの注目のマトでした。いままでのとは全然別モノです。小さい子なんかはかなり興奮してみてました。今回は作るのが間に合わず(そりゃそーだよな。大手メーカーでもムズいっしょ。)に調子が出ないようでしたが次回からこうゆうのを目標にしてくる人が増えると思います。影響力大。 名古屋工学院専門学校のUltra−Chopperは恐竜型で、尻尾がついてるので一見バランスがどうかという感じですが、歩行やバランスがかなり安定していて動きも本物の恐竜みたいです。決勝時も打たれても倒れないし、顔を振って攻撃しても安定してました。 韓国から参加したTAEKWON−Vもかなりイイ動きで、デモで板割やってました。操縦者もテコンドーの胴衣着ていてアピール度満点。見た目はジャイアントロボ風です。韓国って日本のアニメはやってるみたいです。 姫路ソフトワークスの中村さんはムイムイさんと2人で2台出していて、ムイムイさんが作ったテーマソングに合わせてデモやってました。曲の歌詞と動きが合っていて笑います。ROBO−ONEの規程でテーマソングはオリジナルというのがありますが、自分もやりたくなりました。(オレのQYどこしまったっけ?) JinSatoさんのORF-A1は自作NCマシンで作ったというシロモノで、自分でアルミにアルマイト処理してます。根本的に発送が違います。「人間イメージできることは実現可能」という法則がありますが、凡人にはこうゆうことをイメージできません。 かづひさんのWeird-72はおかしいです。一見、サーボ同士を付けただけ(しかもS3003)のように見えます。しかし言われるまでわかりませんでしたが、「あれ、配線は?」。なんとサーボ内に線を通してます。基板も異常に小さいです。「自分でつくったんかなー」と思いましたが「秋月のボードをカットしました。」とのこと。おかしいです。その上にちっさい無線機が空中配線で乗ってます。 おかしいです。縄跳びします。サーボ以外(サーボがフレームと外装を兼ねている)のパーツは木製です。500g切ってます。おかしいです。お昼ご一緒させていただいたのですが、歯の話で盛り上がりました。大会中にロボットの話以外で盛り上がったのはこれだけです。やっぱりおかしいです。 ちなみに桜花は予選あと残り5台の時に52位でしたので最悪57位という結果です。2/1現在でまだ確認してませんが52位でも57位でもいっしょです。次はなんとか決勝までいきたいっす。(上位の方の話では、実際にバトルをするとまたそれなりの問題が出てくるらしいです。) 予選の反省ですが、今回(動きませんでしたが)アニマトロニクスヘッドをつけましたが小さすぎて会場ではよく見えません。ヘッドは大きい機体のときに大きい顔をつくらないとあんまりアピール度は高くないと思いました。 つーか、デカール貼ってないじゃないの!(もういーよ。ちなみにデカール貼った後は「トップコートつや消し」を噴いた方が良いです) 5回ROBO−ONE決勝 2004/2/1 決勝時にはSTAFFでウロウロしてた(あんまり働いてないが)のであまり見れませんでしたが、今回初の「ランブル」という8台が同時にリングに上がって最後まで落ちなかっかったものが勝ちというのが熱かったです。ベスト16から負けた8台が一回と、決勝後にベスト8がやったのですが倒れても「リングに残っていた方が勝ち」というのものなので乱闘のような感じでおもしろかったです。今回からリング下にはマットがしいてあるので落ちてもそんなにダメージはありません。結果的にはキレイな動作をするものよりもパワーがある方が勝つという感じで坂本元さんのHAJIMEROBOTがダントツでした。4台落したそうです。 今までは移動だけで攻撃はあまり効いてるような感じではなかったようですが、今回はルール改正(攻撃時に手を床についてもOK。攻撃時のダウンはノーカウント)によって大技が沢山決まってました。MetaricFighterは逆立ちから倒れて足裏でキックしたり、九大の2325-RXは側転や前転して攻撃したりしてそれらが決まったときには会場から歓声が上がってました。 結果は 1:2325−RX 2:OmniStriker 3:HAJIMEROBOT でした。 参加者の皆様、応援に来てくれた方々、STAFFの人、ご苦労様でした。今日はゆっくり寝られるでしょう。(でも明日ぐらいから違うの作り出したりするでしょうね。) 最後に今回始めて参加した総括です。 1)サーボは金のゆるす限り良いものを使った方が楽だし強いのが作れる。(今の私のレベルでは) 2)外装や板金に凝るよりも、サーボ配置やバランスやモーションの方が先(だと思う) 3)一人では大変。複数でやった方が楽しそう。 4)完成しなくても、エントリーしたら会場に行った方が情報が集まるので絶対行くべき。 5)日ごろから体力をつけた方が良い。特に腹筋(ロボットじゃなくて自分の)。長時間作業だと腰をやられるから。 6)電源系はきちんと作る。特に消費電流とバッテリの出力可能電流を調べる。 7)長時間サーボを動かしているとポテンショ(サーボ内の角度センサー)が狂う(良いものは狂わないのもある)ので長時間かけて作ったモーションが次の日に動かないことがあるので注意する。 8)会場では気になるロボットの製作者にはいろいろ聞いた方が良いが、出場前で調整している人には話しかけないようにしましょう。 9)人がやっていない要素を入れた方がポイントが高いと思う 10)次はセンサー系つけたいっす。出来れば自立型。 但し、これは私「ぴしい」の経験談であってレベルや環境が違うとこの通りではないかもしれませんのでご注意を。 このページを見て、ROBO−ONE参加者の方が増えてくれるとうれしいです。
|
| (C)Copylight 2003. 有限会社浅草ギ研 | 通信販売の法規(訪問販売法第8条)に基づく通信販売業者の表示 |
 RH17-4
RH17-4  RH17-1
RH17-1 

 RH17-5
RH17-5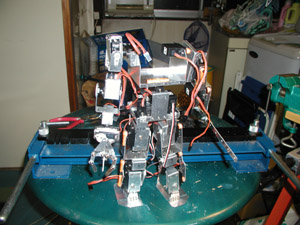 RH17-6
RH17-6 RH17-7
RH17-7 RH17-8
RH17-8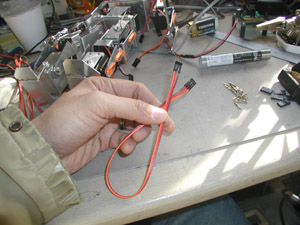 RH17-9
RH17-9 RH17-10
RH17-10 RH17-11
RH17-11 RH17-12
RH17-12  RH17-56
RH17-56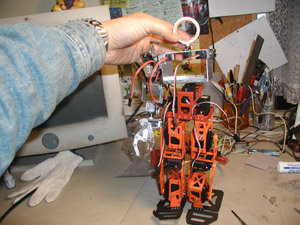 RH17-57
RH17-57 RH17-58
RH17-58 RH17-59
RH17-59 RH17-60
RH17-60 RH17-61
RH17-61 RH17-62
RH17-62 RH17-63
RH17-63 RH17-64
RH17-64  RH17-69
RH17-69 RH17-70
RH17-70 RH17-71
RH17-71 RH17-72
RH17-72 RH17-73
RH17-73 RH17-74
RH17-74 RH17-75
RH17-75 RH17-84
RH17-84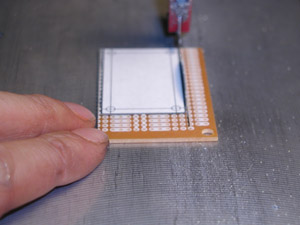 RH17-85
RH17-85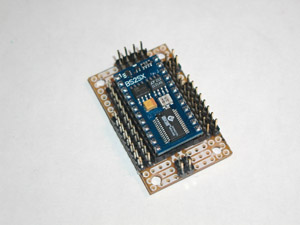 RH17-86
RH17-86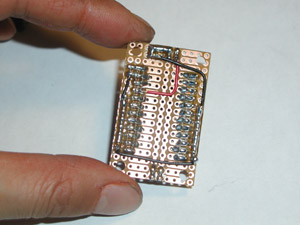 RH17-87
RH17-87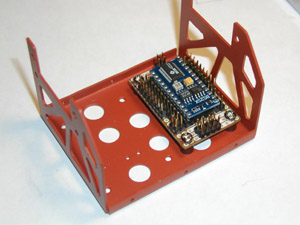 RH17-88
RH17-88 RH17-89
RH17-89 RH17-90
RH17-90 RH17-91
RH17-91 RH17-92
RH17-92 RH17-93
RH17-93 RH17-94
RH17-94 RH17-95
RH17-95 RH17-96
RH17-96 RH17-97
RH17-97 RH17-98
RH17-98 RH17-99
RH17-99 RH17-100
RH17-100 RH17-101
RH17-101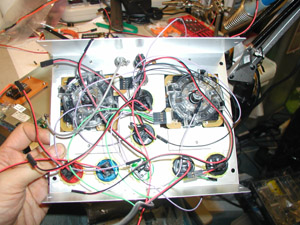 RH17-102
RH17-102 RH17-103
RH17-103 RH17-104
RH17-104 RH17-105
RH17-105 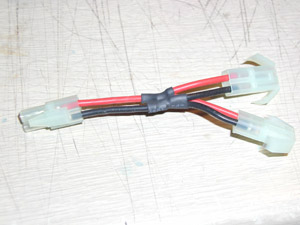 RH17-135
RH17-135 RH17-136
RH17-136 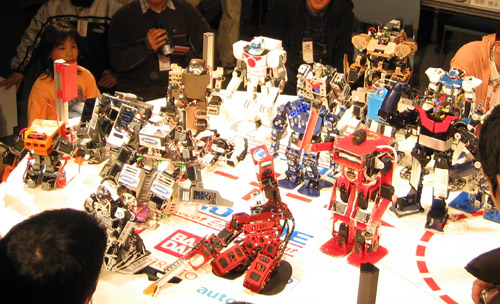 上位の方々
上位の方々