緊急連絡!!
2X09年12月7日
米帝大本営発表 「本日、わが米帝は大日本技研より宣戦布告を受け。戦争状態に突入した。」
プロローグ
2X09年12月4日
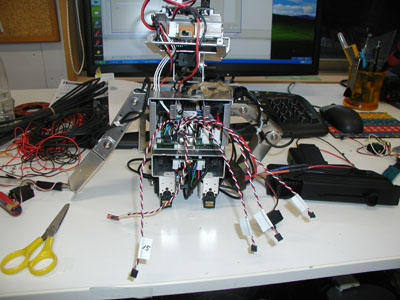
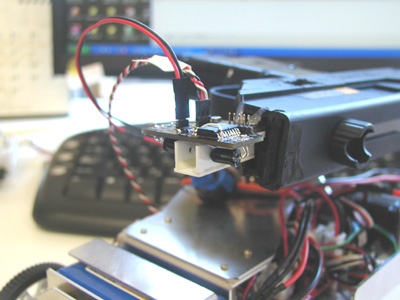
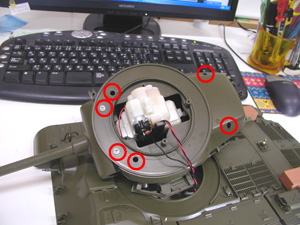
NEWS:「じつは千葉県でも長狭米という、おいしいお米がとれるんですよ帝国」(通称”米帝”。千葉県いすみ市。)は大日本技研(東京都三鷹市。)がひそかに開発中の次期主力戦略兵器である多脚砲台の情報を入手した。これがその画像である。
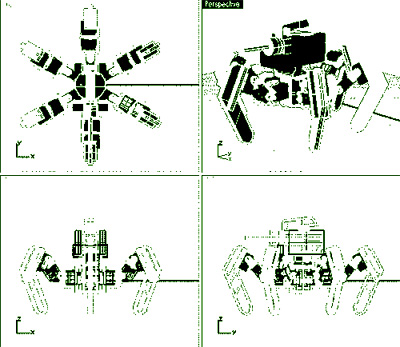
我々はこれを通称「孫グモ」と呼ぶことにする。
これが開発されると、比較的安定を保っていた関東のロボットビルダーの勢力バランスが崩れると判断したわが米帝は、これに対抗する兵器の開発に着手した。
尚、この記事を読むにあたり、士郎正宗先生の「アップルシード」を読んでおくことをお勧めする。1985年に書かれたとは思えない逸品である。また、この記事の見所は、たなか氏が締め切りに間に合うかどうかというところでもある。
(締め切り?)
構成の検討
2X09年12月4日
ここからは、米帝水軍特務局副長官見習担当候補生のP4が説明する。”ぴしい”とよんで欲しい。
さて、戦うにあたり、装備の要件を確認したい。実は秘密裏に、敵国の首相である”たなか”氏より
1)モニタで見れて戦えると面白いのではないか
2)アルミ箔を貼った装甲によってダメージを確認できたら面白いのではないか
3)発射弾数をセンサーで取得し、残弾表示ができたら面白いのではないか
4)発射機構は色々な人に聞いて検討中である
という提案・報告があった。
モニタのところは、我が国が開発した最新兵器である二眼カメラ付き無線モジュール「Remo」を使うことで同意。しかし実はこれは”画像センサー”
として開発されたものであり、映像としての画像は荒く、フレームレートも低い。それは大日本技研には伏せておくことにしよう。しかし、映像が荒い方が戦闘画面としては萌えるという意見もある。
2)と3)は新規でなんらかのセンサーを開発する必要があるが、Remoにはセンサー情報をPCに送るボードを拡張できるのでそれを使う。
4)はラジコンのアンプで代用できないかと考えた。
それよりもまず、攻撃兵器の入手である。
電動ガンの購入
攻撃するにあたり電動ガンが必要である。我が工廠では在庫が無かったので、近所のショッピングモールへと調達に出かけた。ロボットへの搭載を考えるとミニ電動ガンシリーズが良いのではないかとの結論に達した。
我が国が位置する千葉外房ではおもちゃ屋も少ない。探した結果、隣国一ノ宮のベイシアというスーパーでやっとミニ電動ガンを発見。Mac11(マックイレブン)しかなかったのでそれを購入し、意気揚々と帰国した。これがその画像である。

説明書を読む...
おさる君の母上に怒られそうである...
よい子の皆さんは絶対にマネしないでもらいたい。
国益を優先して進める。
プラスチック部分をカットしてロボットに取り付けようと思っていたが、旧型の電動ミニガンと違って、弾をマガジンに入れる方式だった。これでは持つところ(正式にはなんと言うんでしょう?たなかさん)がカットできないではないか!!持つところをカットできないとロボットに取り付けられない。
早くも開発は暗礁に乗り上げた。
つづく。
ガンの分解
2X09年12月5日
マガジンの問題は、仕方がないので横置きにすることにする。出っ張りが大きいのと、弾数が22発しかないというのはかなり問題であるが仕方がない。財務大臣(ヨメ)の目が光っているのでもう一丁購入というわけにはいかないのである。
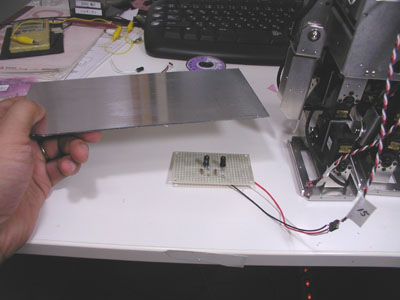
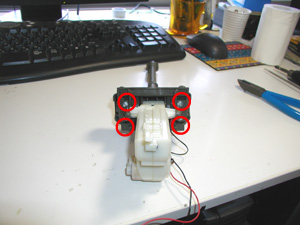
さて、旧式のミニ電動ガンは一度分解・解析したことがあるが、この新型はブローバック機能もついているので内部が大きく変わっている可能性がある。よって解析も慎重に行う必要がある。とりあえず、小さく窓状にカットして内部を観察。持つところ(正式にはなんと言うんでしょう?たなかさん)の底からモータ線が引き出せることが判明。これがその画像である。

実際にRemoのバッテリに直結してみたところ、問題なく動作した。
構成の検討2
構成の検討を続ける。
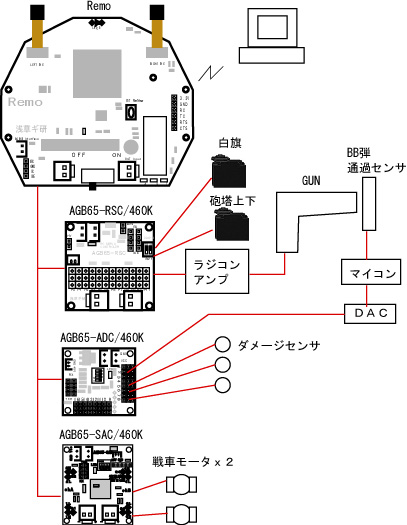
12/4に確認した構成要素から、こちらの構成は以下のようになると考えられる。
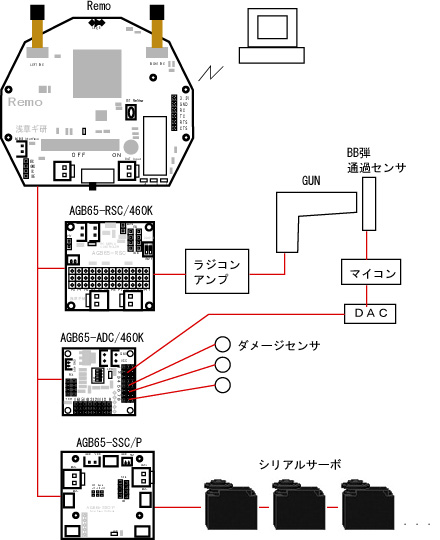
電動ガンの発射機構だが、Remoは現在のところ、小規模のDCモータしか駆動できない(SACを使用した場合)ので、とりあえず、RCサーボ駆動用のAGB65-RSC/460KからラジコンPWMの信号を出し、市販のラジコンアンプ(車用)でガンを駆動できないかと考えた。
ダメージセンサはセンサーの信号を直接ADCで拾える。
問題は残弾の計測である。残弾というよりも発射した数をカウントする、というのが現実的であろう。通信部分を作るのが面倒だったので、弾が通過したら電圧が下がる、というものを作りADCで読み込んでPCに送ることにする。これをBB弾通過センサーと呼ぶ。
大日本技研で作られているものは、ガンの発射と、サーボ駆動はラジコンで行うようなので、共通する部分はRemoとADCから先の部分になる。
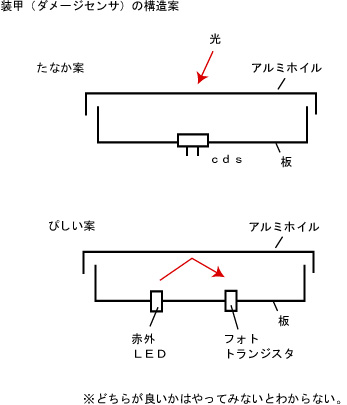
ダメージセンサの構造の検討
たなか氏のアイデアでは、アルミホイルを貼って、それに弾が当たったら穴があく。たとえば、外からの光などをセンサーで測定してダメージを測れないか?というものだった。
なるほど、回路設計屋では考え付かない斬新な方法だ。
ここで、もう少し考えてみる。もし、外からの光の量が違ったら、1発の重みが変わってくるのではないか。たとえば、薄暗い部屋ならなかなかダメージが溜まらないが、晴れた日の外でやると一発で死亡、ということも考えられる。
そこで、装甲の中に赤外線LEDを付け、その光量でダメージを測定するというものも考えた。
どちらもコストが非常に安く作れるので、2種類作って試してみることにする。どちらが良いかは実際に作ってみないとわからない。センサーシステムはトライ&エラーの繰り返しが必要なのである。最悪、どちらも使えないということもありえる。
BB弾通過センサの設計
BB弾通過センサーも、赤外LEDとフォトトランジスタの組み合わせで光遮断による通過センサがよいのではないかと考えた。
当初は手組みで簡単に、と考えていたが、銃口の先端部にセンサーを固定するのと光の軸をまっすぐにする必要性から、構造をしっかりつくらないといけないというのがわかってきた。ケースを上手く作るのは上手ではないので、基板を作ってしまうことになった。だんだんと趣味のレベルから逸脱しつつあるが、これは財務大臣にはナイショにしておこう。
ということで設計が終わったのが下の画像である。
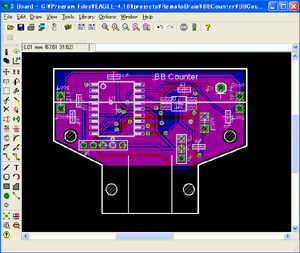
とりあえず双方予備を含めて4セット分を発注。パーツ及び基板が上がるのが約2週間後になると予測され、作業を中断する。
宣戦布告
2X09年12月7日
本日、我が国は大日本技研より宣戦布告を受け、戦争状態に突入した。これにより、実際の戦闘になることがほぼ確定したが、両国ともいろいろと忙しいので「戦闘開始は1月中旬〜3月ぐらいかなあ」ということで同意。戦争状態ではあっても、今後も関東ロボット練習会などで技術交流は行われる見通しである。
射撃制御システムの実装
2X09年12月11日
明日は関東ロボット練習会最大の行事とも言われている忘年会である。昼間は都内各所のロボットショップで練習会が分散開催されるが、敵国の首相と打ち合わせる良い機会なのでそれまでに出来るだけ作業を進めておく。幸いにも、財務大臣が子供を予防接種に連れて行くというので、そのスキを見計らっての作業となった。
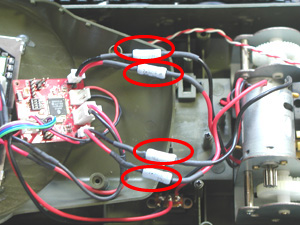
まずは簡単なところで、射撃システムを実装する。実装とはいえ、コネクタを付け替えるだけなので簡単だ。これがその画像である。

ラジコンアンプをモータドライバ代わりに使って、AGB65-RSCでON/OFFする。アンプは車用の「EN-1スピードコントローラ」を使用。これえを選んだ理由は特にないが、通販で探した結果一番安かったもの。車のようにDCモータを駆動するラジコンアンプならなんでも良いと思われる。
・アンプの赤黒線を、RSCのサーボ供給コネクタへ、
・アンプの青/オレンジ線をGUNのモータへ(青を黒、オレンジを赤へ)
・アンプの信号線をRSCのサーボコネクタへ
テストとして、RemoMortionEditorで駆動したところ、問題なく無線での発射が可能となった。RemoMortionEditorはRemoのロボットキットを動かすためのサンプルプログラムだが、AGB65−RSCを拡張したときのテストも行える。ソースも公開している。
尚、今回は画像を使う予定なのでRemoから駆動したが、AGB65−RSCに浅草ギ研のBluetooth無線を直接つけることもできる。つまり、無線発射装置としてだけならRemoは不要である。
cds方式ダメージセンサの試作
時間にまだ余裕があるので、cds方式のダメージセンサを試作してみる。材料はあらかじめ手配済みである。
測定にあたり、Remoを使用した。胴体部分にセンサーボード、AGB65−ADCを入れ、センサーケーブルを出しておく。ソフトはRemoMortionEditorを使用。
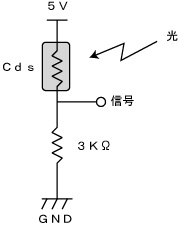
回路はつぎのようになる。
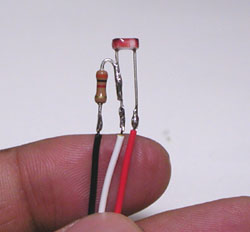
実際に作ったもの。
入手したCdsの抵抗を測定したところ、あかるいところ(スポットライトの間近)で100Ωぐらい、暗いところで70KΩぐらいだったので、3KΩの抵抗で分圧してみた。明るいとCdsの抵抗が下がるので信号の電圧は高くなり、暗いと低くなる。
実際に測定してみた。

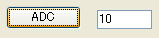
センサーを手の中に入れたところ。つまり真っ暗の状態。AGB65-ADCへは8ビットモードで命令を出しているので、得られる値は0〜255の8ビット値。真っ暗だとCdsは約70KΩなので、3KΩ/73KΩ×256階調=10.52となり、ほぼ計算と同じ値が得られたことがわかる。


スポットライトに近づけると、このように値が上がった。
ということで、明るさを測定することはできた。これが有効かどうかは明日、練習会で実験してみることにする。
赤外線方式ダメージセンサの試作
財務大臣が寝たので引き続き赤外方式を試作してみる。
今回は秋葉でも入手できる赤外線LEDのTLN110(F)とフォトトランジスタTPS611(F)を使用する。回路は簡単だ。TPS611のデータシートにも書いてあるのでここに掲載する。
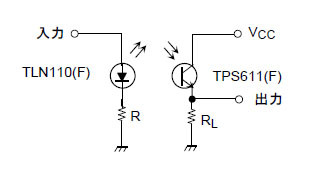
計算及びテストしたところ、Rは75Ω(電流が約50mA)、RLは10〜100KΩとなる。RLは100Kの可変抵抗にすると調整ができてよいのだが、手持ちが無かったのでとりあえず5.1KΩをつけた。AGB65−ADCのセンサーポートからは5V電源が取れる。上図の「入力」と「Vcc」はこの5V電源を接続した。
TPS611の波長特性を見ると、このようになっている。
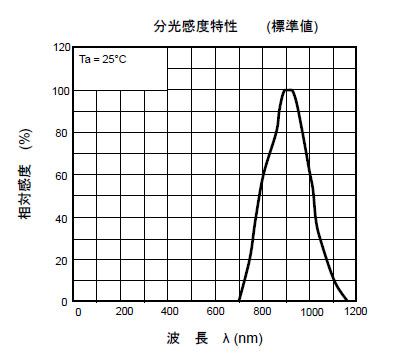
可視光は約380〜750nmなので、赤外線にだけ反応するのがわかる。通常は赤外LEDとフォトトランジスタを向かい合わせにして使うのだが、今回はアルミホイルに反射させて赤外を入力させる。
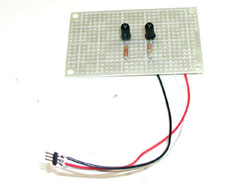
実際に作ったのが下の画像だ。
では実際に動作させてみよう。
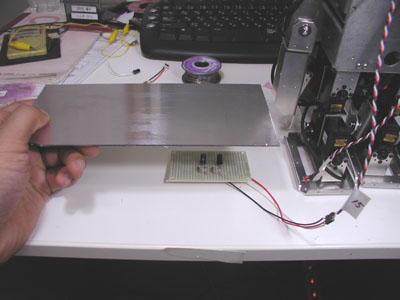
アルミホイルが無かったので、アルミ板を変わりに使ってみる。完全に覆ったところ値が100近辺となった。
アルミ板を少しズラしてみると値が下がった。
尚、こちらの方式は、赤外線の量が測定できないので、抵抗値を変えたり、取り付け方を変えたり、を何度も実験して最適な測定法を探るしかないと思われる。これも明日の練習会にもって行き、テストすることとしよう。
ダメージセンサの検討
2X09年12月30日
先日の練習会におけるダメージセンサ実地テストは、cds及び赤外どちらの方式も問題があることが判明した。cdsはやはり光源の方向に大きく依存し、赤外の方はアルミが破れる具合によっては逆の結果(かえって反射が大きくなってしまう)になった。
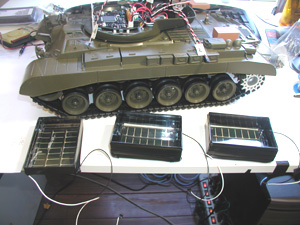
その後、敵国のたなか氏より、太陽電池がなかなかよい、という報告があり、現物を見せてもらうために中立国である秋葉原で会談を行った。これがその太陽電池の画像である。
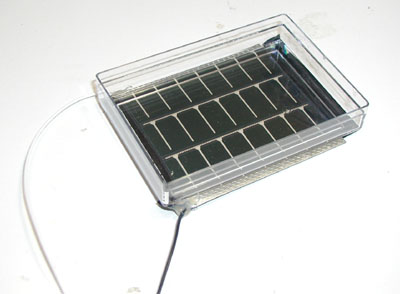
この太陽電池は秋葉原の千石電商で販売されている。本店の2件となりにメカトロコーナーがある千石の店舗があり、その店頭のラックにぶらさがっている。価格は1枚770円であった。
ケースはたなか氏が当初から提案している、近藤サーボのケースが採用された。これはおそらく皆がもっているであろうものを標準とするためである。ちなみに、先日の練習会では我国、敵国に味方したいという勢力も現れ、戦闘になれば参加兵器は二台だけではない可能性も出てきた。
光の量を検知するということでcdsと同じでは?と思ったが、検知面積が面になっているのでcdsよりは被弾率と比例して結果が出やすいことがわかった。また、あとで考えたのだが、起動後数秒間の平均値を取っておき、それからどれだけ値が変化したかで検知すればよいのでは、と考えた。これについては後日実験してみよう。
また、我が国では感圧センサーを生産しており、感圧センサーを面で配置して被弾センサーとする、という提案をしたがコストが大きくなりすぎるので却下となった。
主力戦車の製造

そろそろ兵器の製造を行わないと、会戦に間に合わないので兵器を製造することにした。今回、RemoのヒューマノイドタイプにGUNを付けて、とも考えたが、あまりにもコストがかかりすぎるので別な方法をとることに。Remoのメインボードはロボット神経システムにつながるので、DCモータコントローラをつなげることもできる。ということで移動手段は安価なタイヤ式にする。DCモータは浅草ギ研で販売しているタイヤ付きDCモータを採用した。これはRCサーボのようなケースにDCモータが入っており取り付けに便利である。ギア比も2種類選べるが、今回はギア比が大きくトルクも大きいタイプのR340を選択。

R340の場合、コイル抵抗がマブチモータなどと比べて低い。よってモータドライバを壊さないようにモータの両端に抵抗を入れる必要がある。今回は両端に5.1オームの3W酸化皮膜抵抗を付けた。3Wともなると普通の抵抗(1/8Wカーボン抵抗など)とは大きさが異なる。上の写真の上の水色が今回使用した3Wのもの、下が普通の抵抗である。
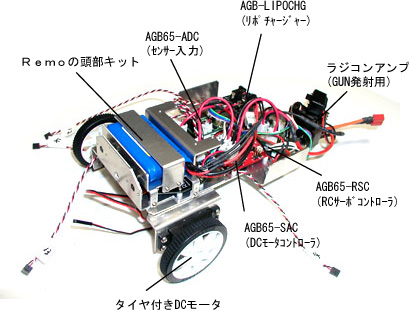
これはフレームを作って、各要素を取り付けたところである。4本出ている線はセンサー用のもので、正面と両側がダメージセンサー用、もう一本が残弾センサー用である。残弾センサーはまだ製作中で、来年はじめ頃に完成予定。
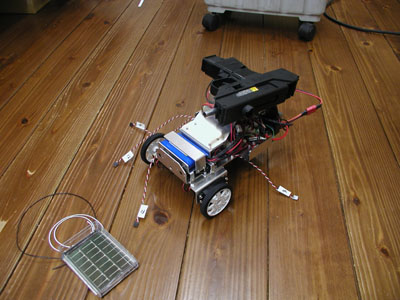
砲塔部を取り付けたところ。手前にあるのは太陽電池である。
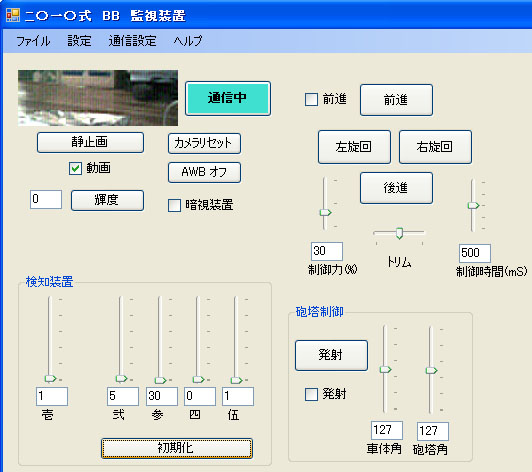
ソフトウェアは、RemoMortionEditorを若干改造して、センサー値を取れるようにした。DCモータ駆動や砲塔制御はまだ実装していない。とりあえず動作テストしたのが下の画像である。

約30cmの距離にコトブキヤ製1/1ホイホイさんプラモを置いてみた。静止画でみたのがこの写真である。センサー値はとりあえず5個取れるようにしてある。
モニタに出す場合にはRGB出力となるが、Gだけ出してみると暗視装置のような画面になるのでは?と考え、動画時にはGだけ出力するモードも追加してみた。
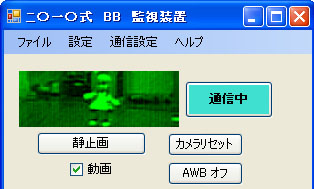
おおっ、それっぽい。
と、ここで隣国に住む義弟が酒瓶をもって襲来してきたので、今日の作業はここまでとする。
ダメージセンサの検討その2
2X10年1月4日
年が明けて2X10年。今月か来月に会戦の兆し。作業を進める。
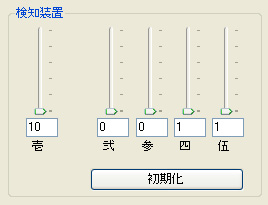
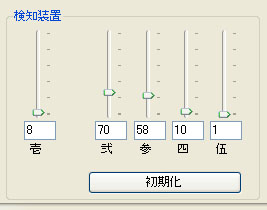
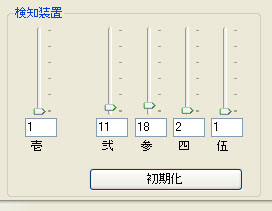
さて、ダメージセンサーだが、先日のたなか氏との会合で太陽電池がけっこうイケるということが判明した。さらにソフト的に取り付け時の値をオフセットすればよいのでは、と考えたので実験してみる。まずはセンサー読み取りの部分に「初期化」ボタンをつけた。これは押した後1秒間で10回のサンプリングを行い、その平均値をオフセットして表示しようという試みである。
実験してみたのが下の写真

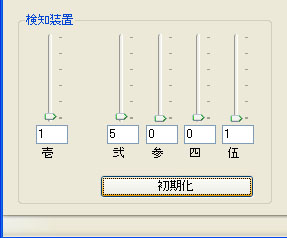
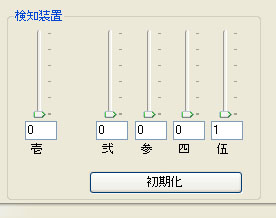
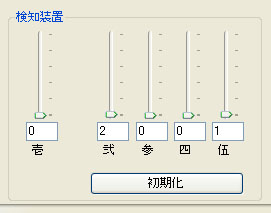
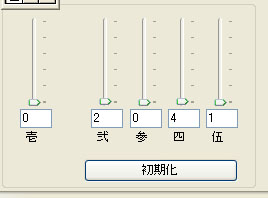
起動後に初期化ボタンを押すと壱〜伍の数値が0に近い値(0か1)になる。そこで上の写真のように装甲(太陽電池とプラケース)に適当に穴を明けたところ、上のような結果になった。装甲は弐のセンサーにつながっており、2個以上穴が空いたときから値が上がり始めた。4個ぐらい穴を空けたら数値が5〜6に上がった。ここで装甲の向きを変えてみたが、床面へ下向きにしたとき以外は0〜1にならなかったので判定が出来た、と考えてよいと思う。
ついでに、戦車を操縦する部分を作ってパネル化した。これで模擬戦はできると思う。
とりあえず、テスト環境はできた。1月10日に行われる練習会で、敵国の兵器との模擬戦による調整が行えそうだ。と思ったら敵国の方はなにやらシステムがトラぶっている様子。
残弾センサの実装
2X10年1月9日
明日は関東ロボット練習会(と、たぶん新年会)である。実は先日カゼをひいてしまい寝込んでたのだが、そのリハビリを兼ねて残弾センサの実装にとりかかる。
過去ログを見ると、基板設計が12/5であった。ほったらかし過ぎである。一応、テスト用に下記のように2枚作ってみた。
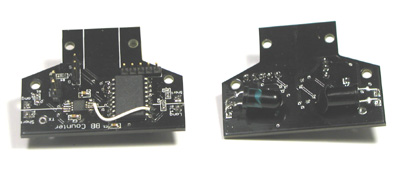
左が裏面、右が砲塔取り付け面である。照射範囲が狭い(約20度)赤外LEDの光を、赤外用フォトトランジスタで受けて、光がさえぎられたらマイコンの外部割込みで検知してDAC経由で電圧出力する、というもの。
裏面の大きなICがマイコンで、小さい方がDACである。マイコンはこんなに大きなものは必要ないのだが、小さいPIC用のコンパイラの使用期限が切れてたのと、大量にdsPICが余ってたのでdsPICを使用。三輪車にカローラのエンジンを積むようなものか。完全にオーバースペックである。
さて、マイコンのプログラムを書くのも久しぶりだが、難しいところはまったくないので小一時間でファームも終了。起動時は出力0Vで、BB弾の発射検出の度に出力電圧が上がっていく。出力値だが、使用したDACは12bit出力になっている。電源はセンサーボードから取るので5V、Vrefも5Vとした(電源に直結)。データを読み取る方は8bitで扱う予定なので、5bit分づつ(値16)増加するようにしてある。つまり、一回の光遮断で16/4096x5V=約0.0195Vの変化となる。尚、DAC側で出力ゲインを2倍にする、という機能があったのでそれも使ってみた。ということで、現在の戦車に搭載されているAGB65−ADCで8ビットモードで読み取ると、一回の光遮断で値2変化することになる。よって残弾を測定できる最大数は128となる。
リロードについては、基板上にプッシュスイッチ用端子を取り付けておいた。プッシュスイッチを押すとマイコンのカウントをリセットし、出力電圧が0Vに戻るようになっている。
テスターで動作確認をし、正常動作したので、実際に砲塔に取り付けてみた。それが下の写真である。
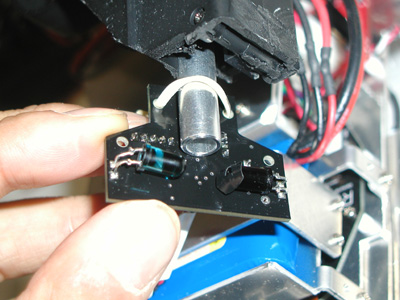
取り付けはまっすぐにしないと大変なことになる。実際、写真のように針金で適当につけてBB弾を発射したところ、3発目ぐらいでズレてLEDにヒットし、センサー部が吹っ飛んでしまった。ということで、テストは「左手でセンサーを押さえ、右手でPCを操作し、足でBB弾を緩衝させるスポンジを抑える」という体制でづつけられ、その間3回ほどでん部がつってしまうという事態になった。
この部分は取り付け冶具を作らないと無理である。ということでこのセンサーを敵国に供与し、冶具を作ってもらおう。そして一個もらおう。
実験の結果、BB弾の発射速度などは問題ないのだが、銃口が広いので光をきちんとさえぎれない、ということがほとんどだった。コレに対して、フォトトランジスタに小さい穴が空いたビニールテープをかぶせたところ、その穴が銃口の中心近くにきちんと固定されれば計測できることがわかった。上の写真の右側はフォトトランジスタだが、見づらいかと思うが、先端に穴の空いたビニールテープが貼ってある。
ということで、センサー壱にこれを接続し、5回連射したところが上の結果である。計算通り、1回の発射につき値2上昇した。
このような数値表現ではわかりづらいので、時間があるときにでももう少しグラフィカルな表示にしようと思う。ガンダムのビームライフルの残弾表示にするか、エイリアン2のライフルの残弾表示にするか。。。
(たなか氏曰くエイリアンのは”パルスライフル”と言うそうな。さすが本職。ちなみに、パルスライフルの残弾表示は撃ってる本人には見えない、観客から見える位置にあるので、と教えてもらった。へぇー。)
交戦規定の検討
2X10年1月10日
本日は関東ロボット練習会の日であった。今回は20人前後の参加があり、技術交流、ロボット談義、ラノベ談義などが行われていた。また、神矢みのる大先生も来場されロボット談義に参加されていてびっくり。

さて、今回は敵国首相と、参戦表明をしている各国代表が集まっていたので交戦規定について検討した。まずは参加表明国であるが、本日の練習会参加の中では
■大日本技研
■米帝
■しまけん国
■イガア国
■B作国
また、忘年会の時の表明で、
■えまのん国
■もた国
場所は、秋葉のショップなどを借りると多大なるご迷惑をかけることになるだろう、という予想から、大日本技研の本社で行うこととなった。フィールドは大日本技研のリビングルームで、操縦は別室にこもって行う。つまり実際のフィールドは見れないという状況がよいのでは?ということになった。
ルールの検討も行われたが、一番の争点となったのはカメラの搭載の義務である。カメラシステムを使用すると高価になるのと混信の問題があるのでカメラ無しでもよいか、また俯瞰カメラを使うか、などの話になったが、結論としては基本的にはカメラを搭載する方向で統一した。ただし、イガア国などは、「カメラ無しで参加してもよいか?」というところもあり、視覚以外で戦うこともOKとなった。さすがニュータイプである。ちなみに音だけで戦うというのもアリである。尚、俯瞰カメラ禁止ということになったが、俯瞰でなければ自機以外にカメラをつけても良い(たとえば観測用の機体が別にある、自分を追尾して映す装置、など)ということになった。
その他ルールであるが、暫定として次のようになった
1.ロボットを直接見て操縦してはいけない。(無線カメラの搭載が望ましい)
2.ロボットにはBB弾発射装置、ダメージセンサを取り付ける。できれば残弾センサも付ける。
3.俯瞰カメラは使用しない(記録用としてはありえる)。
4.ダメージセンサは前と左右の3箇所。今回は後面にはつけない。
5.ダメージセンサは太陽電池方式とする。センサ取り付け角度は45度とする(室内灯の光が入るように)。尚、戦闘開始前に、あらかじめ窓が開いた板によってその環境でのダメージ量を設定し、その値に達したら装甲破損とする。
6.弾切れ時は、自力で操縦ルームまでたどり着けた場合に補給可能とする。操縦ルームに戻る途中で破壊される可能性もある。
尚、ルールについてはやりながら変わっていく可能性もある。勝ち負けの判定だが、殲滅戦(どちらかが全滅したら負け)とフラッグアタック(本拠地を攻撃されたら終わり)があるがどちらでやるかもやってみての検討となった。
大日本技研と米帝はBluetoothを使ってPCでデータ処理するので、PCからシステムメッセージを出したい、と個人的に考えた。女性の声が良いと考え、人形使いさんにお願いして「残弾5%です」などのシステムボイスを録音させてもらった。録音した声を聞いたが、人形使いさんの声はなんとなく機械っぽくてシステムボイスに最適であった。最高のファティマ声であると言えるであろう。残弾センサーの表示は、たなか氏から「ガンダム方式が良い」ということで、黄色い四角がだんだん減っていくグラフィックにすることに。これらを修正して次回の打ち合わせの望む予定である。
残弾表示装置の実装
2X10年1月16日

今日も我が帝国は快晴。 ひさしぶりに何も無い土曜日なので作業を進める。
先の練習会で、大日本技研から技術供与を受けたセンサー取り付け冶具を使って、残弾センサーを取り付けてみた。写真の白いパーツがそれである。箱部には赤外線を通す穴が空いていて、BB弾通過をきちんと検知できるようになっている。動作テストをしたところ非常に良好な動作であった。
残弾センサーの動作が確実になったところで、PC上でのグラフィック表示部も書いてみた。ガンダムのコクピットでググるとコクピットの画像が出てくる。記憶では縦バーで色は黄色だと思ってたが、検索画像はどれも横バーでオレンジだった。レイアウトの関係からとりあえず縦バーにしてみる。グラフィック表示のやり方がよくわからなかったので、イラストレータで書いた絵を、残弾によって差し替える、という方法にした。
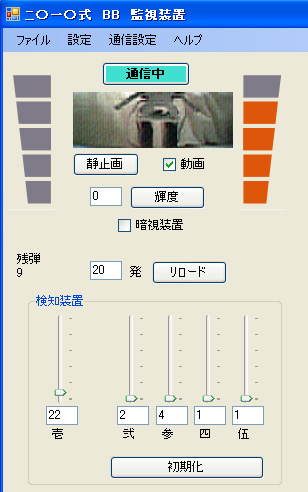
グラフィック部を実装したところがこの画面である。実際に発射してみたが問題なく動作した。
プロジェクトをそのまま圧縮したのがこちら。
BBMonitor.lzh
システム音声の実装
2X10年1月23日
本日はシステム音声を実装してみる。
先日の練習会で人形使いさんに残弾警告などのシステム音声を録音してもらったのでそれを再生できるようにプログラムを変更した。
尚、プログラムについてはこちらのページを参考に作ってみた。
DOBON.NETの音声ファイル再生プログラムのページ
とりあえず、指定したファイルの再生と、五十音音声のテキスト入力による発声の部分を別クラスで記述。ファイル再生部分は下記のようになる。
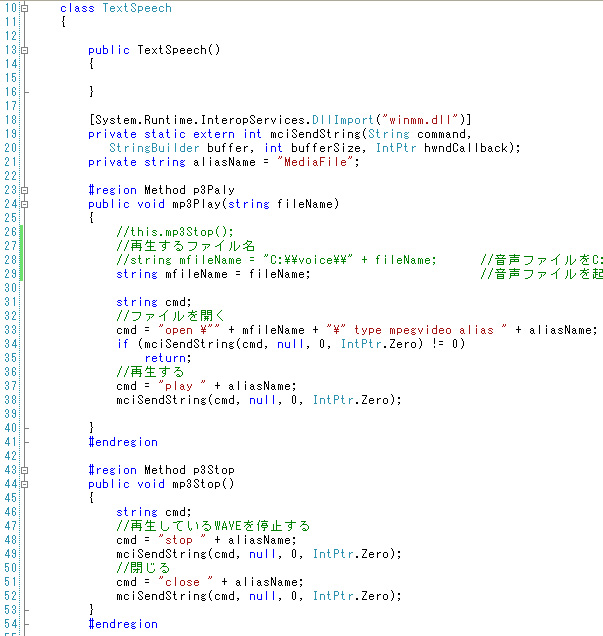
再生方法はいろいろあるが、録音ファイルがmp3だったので、WindowsのMCIというのを使うのが良いようだ。上記サイトのサンプルプログラムをほぼそのままで問題なく動作した。上記サイトではWAVEやMIDIの再生方法も詳細されている。
録音した音源はトリムが必要だが、私はフリーソフトのAudacityを使っている。mp3ファイルをぶつ切りにするときなどに便利なソフトだ。
とりあえず、リロードボタンを押すと「リロードしました」と言うようにしてみて、問題なく動作するのを確認した。
今週はここまで。
二機目のデザインの紆余曲折
2X10年3月13日
徐々に、参加者が増えてきてます。皆さん、かっちょいいのを作ってる。そうゆうのを見てたら、なんか、ウシガエルを作り上げていくモチベーションが下がったので、こっちもかっちょいいのを作ろうか、と。あと、同時に、カメラシステムも1眼のをちょっと試作します。ちょっといろいろあって。
ということで、ウシガエルは保険でそのままの状態で完成として、実験的なバトルはそれで行い、趣味のものをじっくり作っていくことに決定しました。
<ヒルドルブ編>
ウチではスカパーが見れる(というかスカパーしか見れない。地上波も見れないんです。)んですが、ANIMAXでよく「xxを一挙連続放送!」とかやってるんです。で、この前、MS-IGLOOをやってたんですが、ヒルドルブかっけー!戦車が変形してロボットですか!バルキリーの逆!(なにを基準に逆かは不明)
ちなみに、今は夜中の1時にファーストガンダムやってます。昨日はジムがシャアズゴックに刺されてた。
ということでヒルドルブ案。
とりあえず、電動ガンが必要なので購入。今度はM16タイプ(XM177)が売ってましたのでそれを入手。MAC11のように、下から給弾だと造形的にきびしいですので、上から給弾(初期のミニ電動ガンタイプ)がよいと思われる。

分解。(良い子はマネしないでね。なあ、オサルくん)

切断。
M16タイプだと、引き金の前にラッチパーツがあるのですが、よく見たら発射だけを考えるとラッチがなくても発射できると思ったのでそれもカットしてしまった。ラッチは逆転防止なのですが、無くても発射できました。モータの回転終わりにちょっと逆回転したりするので、ジャムる確立が増えると思われますが、小さくしたかったのでコレで。
ちなみに、AKタイプだと、ギアの前にラッチがある(もっと上の位置)なので、そちらだとラッチが付いたまま、このぐらいカットできるようです。AKの内部はこのページに出てました。
<列車砲編>
デザインをどうしようかとWebを検索。列車砲ですか。おっ、ドーラかっけー、グスタフかっけー。ヒルドルブのデザインも列車砲から来てるような気がする。射程50kmですか、シビレる。
砲身が長いのがかっこいいなあ、と思い、ヨメがちょうどDIYの店に行ってたのでアルミパイプを発注。「アルミじゃなくてステンしかないよ。」ということだったのでとりあえずステンパイプを購入(してもらった)。

おー、いい感じ。
ステンは硬くて、切断できませんでした...
ちなみに、φ10のパイプだと、上の写真のようにちょうど良い太さです。φ20〜φ10のパイプを3種類ぐらい用意して、円錐状に継ぎ足せばドーラ砲風なものが作れると思われる。
列車砲いいなあ、いっそ列車砲にするか!と妄想が広がったが、レールはどうする?子供のプラレールがあった!
サイズがダメだった。
エクスガイナーだったらイケるかも。悩む...
<ラジコン戦車編>
と、そこで我に帰る。エクスガイナーなんか買ったら、子供にとられるのは目に見えているし、置き場も無い。田中さんの家で一回だけ動かして終わり、のような気もする。
やはり初心に帰ってヒルドルブ。
そこで気が付いたのだが、キャタピラはどうする?ということで、前にmotaさんが言ってた、1/16ラジコン戦車のことを思い出して、Webで検索。
うーん、完成度が思ったより高いなあ。下手な造形しないで、これをそのまま使ったほうがいいような気がしてきた。
ということでどうするか決まらないままに時間は過ぎていくのでした。
新春戦車解体ショー
2X10年3月19日
春です。
すでに、3回もふきのとうを裏庭で採取しました。てんぷらにして、せいろで食べました。春です。
薪の減りが遅くなりました。春です。
夏野菜の苗作りをはじめました。春です。
春になると、外にでて活動したくなりますね。
ということで、なぜか今、手元にある「指向性スピーカー」を庭で実験してみました。これはアイビーが日本代理店をしている海外の発明品らしいです。半径100m以内に人は一人もいません。浅草ギ研はこういう実験に最適な場所ですね。

庭のデッキに、スピーカーを置いて、たまたまTVでやっていた「徹子の部屋クラシック」を流してみました。ちなみに、ゲストは桃井かおりでした。すごく昔のやつ。
スピーカーは矢印の方向を向いています。結構小さいボリュームに設定すると、上のように60度ぐらいの角度だとほとんど会話が聞こえませんが...

スピーカーの向いているラインまで来ると急に大きく聞こえるようになります。

実物はこんな感じです。超音波で駆動しているそうで、よく見ると中に超音波のトランデューサが沢山ならんでるのが見えます。この写真だと家の中ですが、スピーカーの方向からではなく、直線状にある壁から音が聞こえます。何に使えるか妄想するのもおもしろいですね。現在、ピルクスではロボットに搭載できるように小さいのを作ってるとのことです。
桃井かおりと徹子さんのやりとりを聞いてたら、桃井が「私って、xxじゃないですか。」という口調だった。知らないっつうの。こういう口調は桃井さんがやりだしたんですねぇ。ずーっとほおずえついてた。私ぴしい的には、サバゲに対して「私って、タ脚よりもキャタピラか車輪が好きじゃないですか。」。
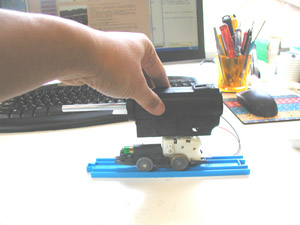
ということで先週末に、1/16戦車ラジコンをポチっと押してしまいました。上のように、庭でスピーカーで遊んでると、宅配便が大きな箱を持ってきた。

キター!でかー!
ではこれから、新春戦車解体ショーを始めます。一度もラジコンとしては遊ばないままバラバラにされる運命。

裏側にはネジがたくさんある。よく見ると、銀色と黒のネジがある。ここを外してみたいところをグッとおさえて、まずはどうやったら外装が外れるか検討してみます。

側面にはそれらしき分割やネジはなし。プラモの戦車と同じような感じ。

おー、サスだ。一万円で、この大きさで、これはすごい。写真ではわからないと思いますが、プラの成型とかかなり安っぽいし、接着剤がべトっとついてたり、国産のラジコンでは考えられない品質ですが、一万円でこの機能はさすがと思ってしまう。

前も、普通の戦車のラジコンのように上下に分割されている。しかしキャタピラかっこいいなあ。クローラじゃなくて、ちゃんとキャタピラになってます。ゴムじゃなくて、プラで一個づつ四角がピンでとまっててキャタピラになってる。オプションで鉄製キャタピラもあるそうな。

後ろ。マフラーのところから添付の液体を入れると、煙を出すそうです。すげぇ。

後部の上面。すき間があいてて、中が見えます。
やはり、ネジからか。簡単に外れなかったらどうしよう。と思ってたら、裏ネジ8本を外しただけで簡単に上下に開きました。
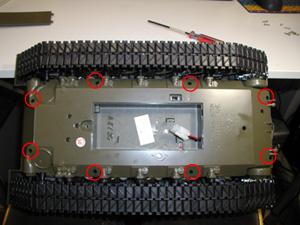
裏側の周囲8箇所の銀色のネジを外せばOKです。黒いのはギアボックスなどの固定用なので外さない方がいいですが、中を見たら結構簡単なとりつけだったので、バラバラになっても簡単に戻せると思います。
では、オープン!
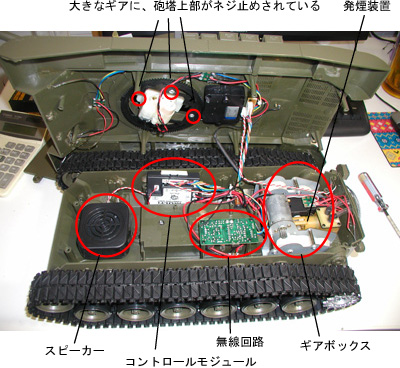
こんな感じでした。
ギアボックスは普通な感じ。黄色いのが発煙装置らしい。スイッチが入るとシリンダーがピストン運動するような構造だ。どうゆう原理なんだろうか。

これがメインの装置。スモークから来てるコネクタに「SM」とか書いてあるのでわかりやすい。IRPORTというのと、M.G.FIREというコネクタがあるがなにもつながってない。IRの方は赤外線バトルもできる製品用だろう、と推測されるが、MGファイヤはなんだろう?
RCサーボは一個も使ってなく、このボードで全部のモータを駆動しているようです。
モータはポテンショなど無く、全部オープンループ制御。そうだよなあ、戦車見ながら操縦するから位置制御いらないよな。

アンテナがここに来てるので、これは無線回路と推測される。

メイン基板とアンテナ基板を外す。コネクタを外して、スイッチが2箇所ネジ止めされてるところを外すだけで簡単に分解できた。これらは不要。スピーカーとかはとりあえず残しておこう。だいぶ広いペイロードが確保できました。

砲塔裏面はこんな感じ。3箇所のネジを外すだけで砲塔は外せそうです。大きなギアの右側にマブチ130のギアボックスがあります。これもオープン制御。
砲塔を車体上部から外したところ。マルのところのネジを外すと、さらに砲塔下部が外れる

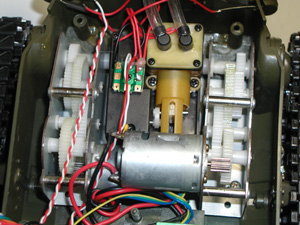
砲塔の中身。白いギアボックスが発射機構の様子。後部の黒いギアボックスが砲塔の上下。白いギアボックスはデフォルトでバネで上向きに押されており(写真的には砲身が下に押されてる)、指で押すと上下する。黒いギアボックスの最終段は斜めにカットされた円盤で、これで白いギアボックスを押す構造。砲身上下はクローズループ制御(とかくとかっちょいいですが、ようはRCサーボで)でしたいので、黒いギアボックスは不要と判断。

黒ギアボックスは3点でネジ止めされている。ここを外す。ここまで、ネジ関係は全部タッピングネジで、ネジ止め剤も使われてません。ネジは結構山が削れてるのがあるので外すのはかなりゆっくりやらないとマズい。

発射機構の横に黒いパーツがあるが、これは配線をまとめるだけのものと判明したのでこれも撤去。ついでに上下運動用のバネも外します。

弾ケースもネジ止めされてるのでそれを外すと、砲塔上部も外せました。砲塔上部と砲身部はラッチ構造になってるので、マイナスドライバでちょっとコジってやる必要があった。だいぶバラけてきた。
不要な部分のケーブルを切断後。さらに外してみる。写真の4箇所を外すと、砲身の軸になっているプラパーツが外せそうだ。

軸パーツを外したところ。

すると、横にネジが出現するのでこれも外してみる。

こうなりました。真ん中の部分は軸のためのものなので不要。

真ん中を除いて、ネジを付け直したところ。これで発射機構だけ取り出せました。発射用のバネは、けっこう小さい。想定してましたが、マルイの電動ミニガンよりはかなり威力が弱いと思われます。取り説読むと距離は20〜30mと書いてあった。

使えそうな部品だけ集めてみた。
さて、どうするか。
と、ここで子供の乱入により終了。
2X10年3月22日
日付は変わりまして、再開。
モータはRS-380SHとかいてある。RS-380ということはマブチですね。端子間の抵抗は約5オームでした。
AGB65-SACで駆動するには、ちとでかすぎる感もあるモータですが、電流制限をして駆動実験してみた。SACの電流出力限界は700mAぐらいなので、7.2V/10オームぐらいで700ぐらい流せる計算になる。初めは様子見で5.1オーム3Wの酸化皮膜抵抗をモータの各端子(1モータに2個)入れて実験したところ、モータが回せなかった。で、だんだん抵抗を下げて各2オームでなんとか動かせました。計算だと2オームだとちょっとオーバー気味。モータドライバが焼けないことを祈るしかない。

前回の車輪型のエレキパーツを移植した後はこうなりました。砲塔先頭に残弾センサーも付けました。これだけ砲身が長いとあまり違和感ないですね。たなかさんがかっちょいいカバーを作ってるそうなので期待。
動作テストも良好。4/10の大日本技研での対戦までに、被弾センサーを取り付けて、とりあえずこの形で戦う予定となった。
この後、予想外の仕事が入ってしまったのでここまで。
被弾センサー調整、擱座モーションの作成
2X10年3月30日
テスト戦闘まであと2週間切りましたね。そろそろ仕上げないとマズい。
ということで、開発の谷間(自分以外のスケジュールが合わなくて何もできない)に入ったので、最低でも被弾センサー接地、できれば擱座モーションまでいきたいところ。
ちなみに、IMEで「かくざ」と打っても擱座と出ませんね。
被弾センサーは、現在2案あって、
A案) 太陽電池を透明プラケースに貼って、ロボットの前と左右に取り付けるという
B案)太陽電池にドーム型のアルミホイルを貼って、ロボットの上の方に取り付ける
とあります。
たなかさんがB案でやってるようなので、比較のために、こちらはA案で作って見ます。とりあえず、購入しておいた太陽電池をプラケース(近藤科学のサーボケース)に貼って端子を出し、側面を黒ビニールテープで覆ってみました。
太陽電池は「千石電商2号店の店頭にある770円のヤツ」がとりあえずの標準品になってます。でも、現在売り切れの様子。500円のもあるみたい。ちょっと小さいのかな?

取り付けは、天井の電灯の明かりが入るように、45度の角度で取り付けることになってます。
簡単にやろうとして、ホットボンドでくっつけようとしたが45度には固定できなかった。

前面はちょうど良い感じで傾斜してるので、簡単に付いた。

その辺に落ちてたケミカルウッドで、側面の取り付け冶具を作りました。

ということで側面も、だいたい45度で設置完了。時間が無いので、全部ホットボンドで。ホットボンド上等!
あとは、3つの合計がいつくかになったら擱座、というプログラムを組めばよいのですが、大体どのぐらいの数値になるか実験してみました。実際には環境に大きく左右されるので、操作画面上で合計値設定ができるようにします。
まず、室内でアルミホイルを付けてない状態。向かって右側がセンサー「参」、左が「四」。四側は机の下なので結構暗い。参側が南面で、窓が開いているので明るい。手前側は若干逆光になっているので、人間的には一番明るく感じるが、実はちょっと暗い。というデータが出ました。四にかんしては、後で判明しましたが、センサー自体の出力も小さいようです。取り付け方なのか、太陽電池のバラツキなのか。。。
手前の「値=70」ですが、AGB65−ADCで値を取得しているので、レンジは0〜5V、8ビットモードなので0〜5Vが0〜255の値に対応します。70ということは70/256*5V=約1.37Vの出力、ということになります。後で計測したのですが、室内の光がよく入る位置だと2Vを超えます。
写真はフラッシュたいたので、ちと暗めですが、実際はもっと明るいです。体感では。
アルミホイルを取り付けたところ。側面も目張りしたので、光がまったく入らず、出力は0となっています。被弾センサーは弐、参、四のところです。壱は残弾センサー、伍はあまってるヤツ。
ミニ電動ガンで手前(センサー弐)を打ってみました。とりあえず2発命中。値は0−>2になりました。値2=0.04Vですね。出力は安定してます。フラつかない。

側面のセンサー四を手前に向けて、3発ほど命中。しましたが、値は0のまま変わらず。どうやらセンサー四は出力が弱いようです。
さらに10発ほど命中させて、値が上がるところまやった図。センサー四の値が今度は4に上がりました。
ということで、センサー毎にバラツキがけっこうあることが判明。但し、なんらかの反応があるので、とりあえず使えそうな感じです。
次に、方向での変化を見てみました。3箇所に10発ほど命中させた状態で測定。「四」側が暗いので、10発当たっているにもかかわらず、値は2です。センサー弐は2発で値2になりましたので。
合計は31。
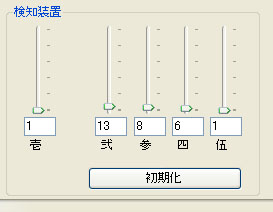 
反対側を向かせてみます。参は暗い方を向いたので18−>8と半分ぐらいに下がりました。四は明るい方を向いたにもかかわらずに2−>6となってます。
合計は27。合計値はあまりかわらないですね。ということで、合計値で判定すれば、ダメージ判定として使えそうな感じです。
センサーケースですが、サーボケースは深いパーツ(そこ)と浅いパーツ(ふた)の2種類があります。今回、弐だけ浅いケースでやってます。弐は比較的、環境変化が少ないので、もしかしたら浅い方ならあまり影響がでないのかもしれません。が、手持ちが無いので実験できず。
撃ったのはミニ電動ガンで、距離は1mぐらいでしたが、ケースにヒビ入りますね。この辺は前にたなかさんが実験してたような感じ。たなか氏曰く、ポリカとかにしないとダメかも、と言ってましたが、その通りだった。一箇所、当たり所が悪くて、カケた部分もありました。一回の実験でこれだったら、試合だったらボロボロになるかもね。あと、平面のところに結構ヒビ入ります。これで感度が変わるかもしれない。
で、実験してみました。写真を クリックすると動画が見れます。(ろぽたるでもアップしてます。)

お、いい感じ。ヤラれたのがわかる?白旗が良く見えないかも。
現在の構成はこんな感じ。
|