初めに
以前取り上げたPCからのRCサーボの制御ソフトをキット化して販売しましたのでこれを使ったデモロボの作り方を紹介致します。 これは、お店などを経営している方にも使えるかと思います(店の看板が動くカニだったりとか)。また、RCサーボを使ったロボットを作成している方には、動作データ作りなどにも使えるかと思います。キットはWindowsPCと接続するだけで動くので特別な知識
などは必要としません。
これだけでは ほんとにただの宣伝になってしまうので、デモロボを作る時に行う板金についてもご紹介致します。とりあえずデモ用なので非常に簡単なつくりにしようかと...
(本にも色々な板金について書いてありますので買ってください...)
準備
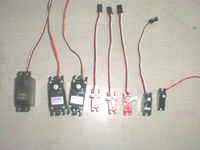
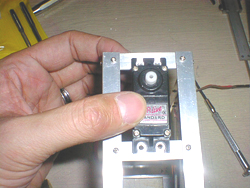
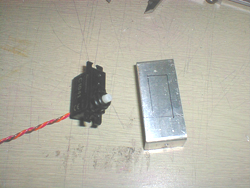
RCサーボを使ってデモロボを作っていきますが、デモ用にわざわざサーボを買う余裕もないのでジャンク箱をいろいろ探した結果、写真のようなRCサーボが浮いていましたのでこれを使います。
 Ex7-1
Ex7-1
これ以外に当方で販売している「RCサーボシーケンサーキット」を使います。これは、当ページでたびたび紹介しているシリアルサーボコントローラ(以下SSC)を使って、PCからRCサーボをシーケンス駆動するというものです。「シーケンス」というのは、英語で「Sequence」と書いて連続・連鎖・連続して起こる結果という意味があり、この場合のシーケンス駆動というのはRCサーボを連続して動かすということになります。キットにはWindowsソフトウェアが付属されており、マウスクリックで8個(最大16個)のRCサーボを動かすことが出来ます。
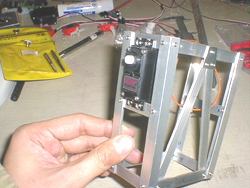
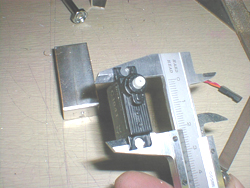
製作にあたり、大まかな設計をします。設計とは言っても浅草ギ研なので本当におおまかに、紙にフリーハンドでイメージを書いた後に、ノギスを使ってRCサーボの寸法を測り、だいたいの大きさを決めていきます。
 Ex7-2
Ex7-2
フレームの作成(アルミの加工)
フレームにはアルミ板を使うことにします。アルミ板はプラ板よりも硬いので糸ノコなどで切断していくのは骨がおれます。出来れば、電動カッターの使用をお勧めします。
 Ex7-3 電動カッター
Ex7-3 電動カッター
写真7-3はHOZAN製の電動カッターです。秋葉で2万で購入しました。本来は基板などを切るものですが、アルミ板も1.5mmまでなら切断することが出来ます。加工点数が多い時は、手で切るよりも格段に作業速度が向上します。
 Ex7-4
Ex7-4
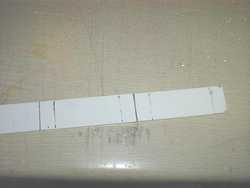
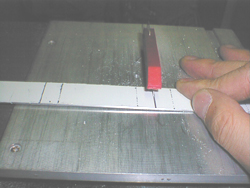
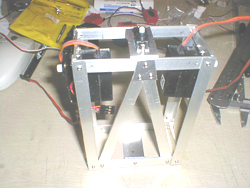
デザインを色々と考えましたが、アルミ板を延々と切断するのも大変だなと思ったので、デザインはまったく無視(おいおい)してアルミ棒を使ってフレームを作ることにしました。厚さは1mmです。1.5mmを超えると、手で曲げたりとかが出来なくなるので1mmぐらいが強度と加工のしやすさを考えて一番良い厚さだと思います。L字型や、パイプ型など、いろいろな形をそろえておくとイザというときに苦労して加工しなくてすむので便利です。1.5mぐらいの長さで300円前後で購入しました。
写真はフレームに必要な分だけ切断したところです。電動カッターをつかったのでここまでは5分ぐらいしかかかっていません。
 Ex7-5
Ex7-5
切断が終わったら切断面をヤスリがけしてバリ(切断時にヘリがギザギザになってしまうもの)を取り除いておきます。また、角はあぶないので出来るだけ削っておきます。
 Ex7-6
Ex7-6
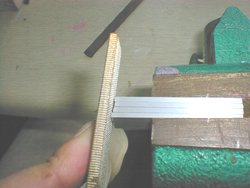
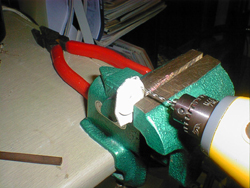
同じ長さのものを何個も作る場合には、あらかじめ少し大きめに切っておき、まとめてヤスリがけすると同じ長さにそろえることが出来ます。写真では4本のアルミ板を同じ長さに調整しています。この時、万力ではさみ固定します。
今回のように、棒を組み合わせて作る造形の場合には長さがきちんと合っていないと組み合わせたときにゆがみが生じますので、根気よく、きちんと長さを調整することを心がけます。

 Ex7-7,8
Ex7-7,8
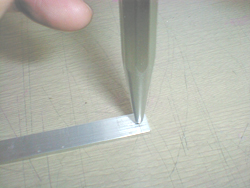
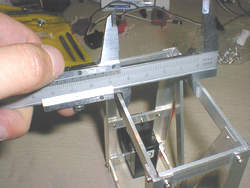
ある決まった長さだけ切断や折り曲げする場合に、短い長さの場合ならばノギスでキズをつけて済ます方法があります。いちいち線を書いていたのでは面倒なので、写真左のようにノギスをあてて先端のとがっているところで線をいれます。
 Ex7-9
Ex7-9
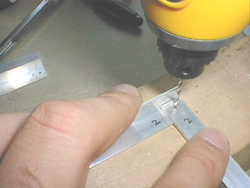
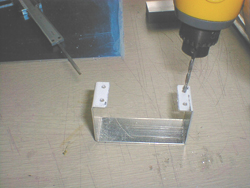
切断が終わったらネジを使ってくみ上げていきますが、まずはネジ用の穴をあけていきます。
穴あけにはまず写真のかなづちとセンタポンチというものをつかってドリルがすべらないように小さいくぼみをつくります。
 Ex7-10,11
Ex7-10,11
穴を空けたいところに正確にしるしをつけて、センタポンチをあてて軽くたたくと写真右のような小さいくぼみが出来ます。

 Ex7-12,13
Ex7-12,13
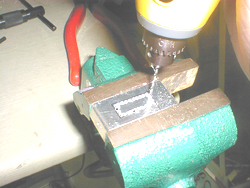
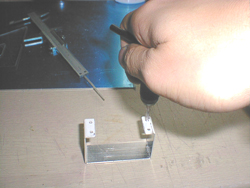
写真のドリルはミニドリルというもので、やはり秋葉で1万ぐらいで購入しました。私の場合は通常3mm以下のネジを使っていますので、ドリルも3mmぐらいまでのもので十分です。
センタポンチを使わないと、ドリルの歯がすべって狙い通りのところにあけるのは至難の技です。予算がある人はボール盤といって、ドリルが垂直に取り付けられていてハンドルを降ろすとドリルがまっすぐに下がる機械がありますのでこちらを使うとより正確に簡単に穴を開けることができます。一番安いもので1.6万円からありますが、2,3万ぐらいの卓上のものが便利です。
 Ex7-14
Ex7-14
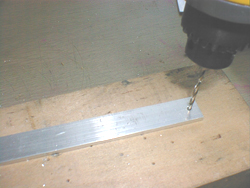
ネジで2つの板をとめる場合には、2つの板の正確な位置に穴をあける必要があります。但し、あまり正確でなくても良い場合には写真のように2つの板を合わせてドリルで同時にあけるという方法もあります。これなら、2つの板の穴の位置がズレるということはおきません。
 Ex7-15
Ex7-15
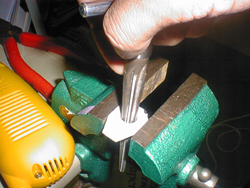
ネジ穴をつくるには写真のようなタップという器具を使います。ナジ穴をつくることを「ネジをきる」ということもありますが、これで切って行きます。
 Ex7-16
Ex7-16
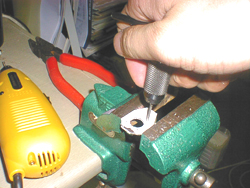
ネジを切るには、あらかじめネジの径の80%程度の大きさの穴(下孔という)をあけておき、この穴にタップを差し込んで切って行きます。今回のフレームには基本的に2mm径のネジを使うことにしましたので、下孔は1.6mmになります。
タップは写真のように手でまわします。アルミなどのやわらかい金属は問題ありませんが、鉄などの硬い金属を切る場合には、回している途中で引っかかる感触があったらすこし逆回転させ、切りくずを外に出してからまた回し始めます。
 Ex7-17,18
Ex7-17,18
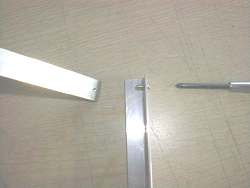
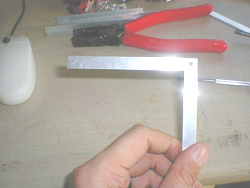
写真のL時型のアルミ板には2mmの穴をあけました。もう片方の板には上記Ex7-16で空けた2mmネジ穴がありますのでこれをネジ止めすると右の写真のようなL字型のフレームができます。この容量でフレームを作っていきます。
 Ex7-19
Ex7-19
 Ex7-20
Ex7-20
 Ex7-21
Ex7-21
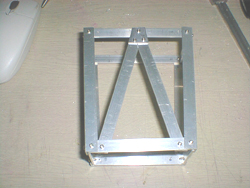 Ex7-22
Ex7-22
肩の作成
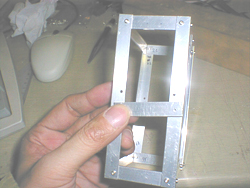
 Ex7-23,24
Ex7-23,24
クレームの横の肩の位置にRCサーボを取り付けます。
まず、ギリギリサーボが入る位置に横棒を入れます。
 Ex7-25
Ex7-25
RCサーボを入れてみて、ネジ止めの位置にマジックでしるしをつけます。

 Ex7-26,27
Ex7-26,27
一旦、横棒を取り外してからネジ穴を切ります。このRCサーボの取り付けには3mmのネジを使います。下孔は2.5mmのドリルで穴をあけました。

 Ex7-28,29
Ex7-28,29
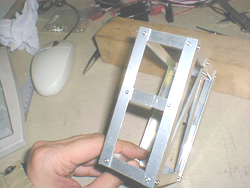
再度とりつけて穴の位置を確認します。
 Ex7-30
Ex7-30
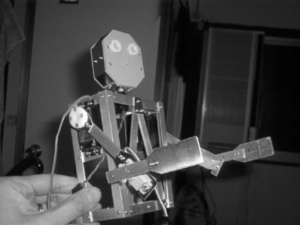
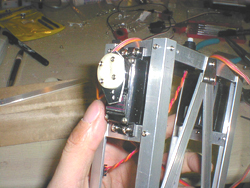
ネジ止めするとこのようになります。これが肩の部分で、同様に他の部分も作っていきます。
尚、今回は時間の関係から上半身のみとしました。機会があれば下半身も作成していきたいと考えています。(さらに時間があったら二足歩行とか...)
腕の作成
 Ex7-31
Ex7-31
首の取りつけ部分をつくってみます。
まず、取り付け位置の寸法をノギスで測ります。
 Ex7-32,33
Ex7-32,33
測った寸法をアルミ板に書き、カッターで切断していきます。
アルミ板は通常、片面にはビニール(写真では白いビニール)が貼ってあります。加工時にはアルミ板の表面にキズがつきますが、このビニールの面を表になるように加工しておけば、最後にビニールを取り除けばキズがつくということはありません。
切断が終わったら万力にはさみ、角材をあてて折り曲げます。
 Ex7-34
Ex7-34
 Ex7-35
Ex7-35
 Ex7-36
Ex7-36
 Ex7-37
Ex7-37
 Ex7-38
Ex7-38
折り曲げた取り付け金具にRCサーボを取り付けます。写真のサーボは下からコードが出ているタイプなので、上記で作った金具にサーボの大きさの四角い穴をあければ取り付けることができます。
 Ex7-39
Ex7-39
ノギスで測った大きさにマジックでしるしをつけます。
 Ex7-40
Ex7-40
ドリルでその形に添って穴をあけていきます。この穴同士をニッパで切り取ると、おおまかに四角い穴が出来上がります。
 Ex7-41
Ex7-41
ヤスリを使って正確に寸法通りの四角い穴を空けていきます。
 Ex7-42
Ex7-42
サーボを入れて、ネジ穴の位置に3mmのネジを切ります。
 Ex7-43
Ex7-43
これで首部分の完成です。
腕の作成
 Ex7-44
Ex7-44
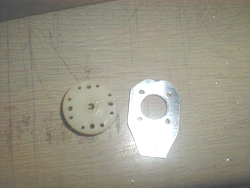
次に腕部分をつくってみます。肩に相当するパーツを切り出しました。これにサーボホーンを取り付けます。サーボホーンはRCサーボを購入すると付いてきます。
 Ex7-45
Ex7-45
サーボホーンを取り付けるには、かなり大きな穴をあける必要があります。手持ちのドリルで大きなものが無い場合には、写真のようなハンドリーマを使って大きな穴をあけます。写真のハンドリーマは3mm〜19mmのものなので、あらかじめ3mmの穴をあけてリーマを差込、穴を拡張していきます。
 Ex7-46
Ex7-46
サーボホーンが通る大きさの穴になったら、サーボホーンを差し込んでまとめてドリルで穴をあけます。2mmのネジを使う予定なので、とりあえず1.6mmのドリルで穴を開けました。
 Ex7-47
Ex7-47
写真ではわかりづらい(アルミに貼ってあるビニールも白だったので)ですが、サーボホーンを取り外してネジを切ります。
 Ex7-48,49
Ex7-48,49
肩部分のできあがりです。
 Ex7-50
Ex7-50
取り付けるとこうなります。
 Ex7-51
Ex7-51
同様の段取りで、ひじまでをつくりました。ひじ部分は曲がるようにさらにRCサーボを取り付けています。
 Ex7-52
Ex7-52
さらに、ひじから先までを作りました。ひじ部分のサーボはオレンジ色が合わないのでこの後、灰色に塗っています。
腰の作成
 Ex7-53
Ex7-53
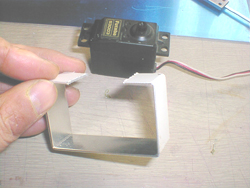
腰部分のRCサーボの取り付け金具をつくります。同様の金具は市販もされていますが、このように手作りで作ることも出来ます。10mm幅、1mm厚のアルミ板を写真のように折り曲げます。
 Ex7-54,55
Ex7-54,55
サーボ取り付け位置にネジをきります。
 Ex7-56
Ex7-56
このようにサーボを囲むようにアルミ板をとりつけました。このアルミ板に色々なものを取り付けることができます。
 Ex7-57
Ex7-57
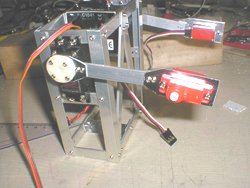
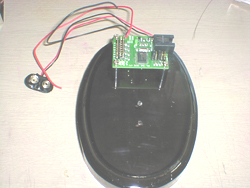
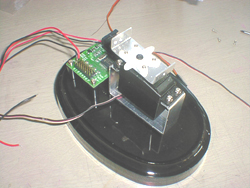
土台となるものを用意します。写真の土台はアクリル製の模型用の展示台です。350円ぐらいで模型屋で購入できます。また、画材屋などでは金属製の重いものも売られています。
写真ではすでにSSCが取り付けられています。
 Ex7-58
Ex7-58
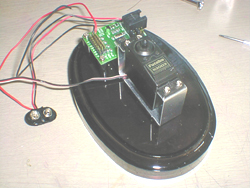
Ex7-56で作った金具の底部分にネジを切り、アクリルの下部分からネジ止めしました。
 Ex7-59
Ex7-59
その上に、首部分でつくったのと同様の方法でつくったサーボホーンの取り付け金具をつけてみました。これに本体を取り付けて固定します。
SSCの外部電源化
 Ex7-60
Ex7-60
SSCは9V、RCサーボは6V(又は4.8V)で動きますが、デモで動かすのに乾電池を使っていたのでは電池代がかかってしまいます。ここではこの2つの電源を外部電源化します。とは言っても、タダ単にACアダプタを取り付けるだけです。
9VのACアダプタというのはなかなか無いのですが、秋葉なら千石通商と秋月電子に安いものがあります。特に秋月は出力がでかい(数アンペアとか。普通、電子回路を動かすには数百mA程度で足りるが、モータ等を動かす場合には数Aが必要なときもある。)
ものが置いてあります。

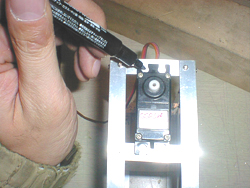
 Ex7-61,62
Ex7-61,62
SSCから出ている線を切って、ACアダプタ用のジャックを取り付けました。
ACアダプタは中心と外側の2極(プラスとマイナス)があり、ものによっては中心がプラスだったりマイナスだったりするので注意が必要です。ACアダプタをコンセントにさしこんで、テスタで極性を図ってから接続するのが一番間違いない方法です。
今回、RCサーボ用の電源は6Vのアダプタが売っていなかったので5Vのものを使用しています。RCサーボは4.8〜6Vで動くので問題はありません。電圧が大きくなるとトルクが大きくなり、動作スピードも若干早くなるようです。
 Ex7-63
Ex7-63
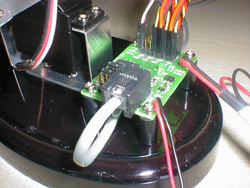
シーケンサーキットには、テレホンジャックコネクタ−DSub9ピンコネクタ変換ケーブルが付属されています。SSCとPCとの通信はこのテレホンジャックコネクタを使用します。
 Ex
Ex