| 命令値 |
動作 |
方向 |
フォーマット |
| 1 |
全ポート読み取り(8bit) |
送信 |
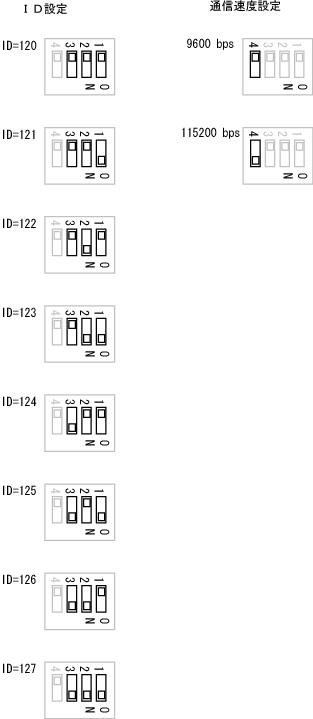
[255][ID(120-127)][バイト長(1)][命令(1)] |
| |
|
受信 |
[255][ID(120-127)][バイト長(17)][命令(1)][P1結果][P2結果]...[P16結果] |
| 2 |
1ポート読み取り(8bit) |
送信 |
[255][ID(120-127)][バイト長(2)][命令(2)][ポート番号(1-16)] |
| |
|
受信 |
[255][ID(120-127)][バイト長(3)][命令(2)][ポート番号][結果] |
| 11 |
全ポート読み取り(12bit) |
送信 |
[255][ID(120-127)][バイト長(1)][命令(11)] |
| |
|
受信 |
[255][ID(120-127)][バイト長(33)]
[命令(11)][P1_H][P1_L][P2_H][P2_L]...[P16_H][P16_L] |
| 12 |
1ポート読み取り(12bit) |
送信 |
[255][ID(120-127)][バイト長(2)][命令(12)][ポート番号(1-16)] |
| |
|
受信 |
[255][ID(120-127)][バイト長(4)][命令(12)][P?_H][P?_L] |
| 254 |
セルフチェック |
送信 |
[255][ID(120-127)][長(1)][254] |
| |
|
受信 |
[255][ID(120-127)][長(1)][254] |
| 上以外 |
無視されます。 |
|
|